 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeContributing Components of Metabolic Energy Models to Metabolic Cost Estimations in Gait
Oct 18, 2023Objective: As metabolic cost is a primary factor influencing humans' gait, we want to deepen our understanding of metabolic energy expenditure models. Therefore, this paper identifies the parameters and input variables, such as muscle or joint states, that contribute to accurate metabolic cost estimations. Methods: We explored the parameters of four metabolic energy expenditure models in a Monte Carlo sensitivity analysis. Then, we analysed the model parameters by their calculated sensitivity indices, physiological context, and the resulting metabolic rates during the gait cycle. The parameter combination with the highest accuracy in the Monte Carlo simulations represented a quasi-optimized model. In the second step, we investigated the importance of input parameters and variables by analysing the accuracy of neural networks trained with different input features. Results: Power-related parameters were most influential in the sensitivity analysis and the neural network-based feature selection. We observed that the quasi-optimized models produced negative metabolic rates, contradicting muscle physiology. Neural network-based models showed promising abilities but have been unable to match the accuracy of traditional metabolic energy expenditure models. Conclusion: We showed that power-related metabolic energy expenditure model parameters and inputs are most influential during gait. Furthermore, our results suggest that neural network-based metabolic energy expenditure models are viable. However, bigger datasets are required to achieve better accuracy. Significance: As there is a need for more accurate metabolic energy expenditure models, we explored which musculoskeletal parameters are essential when developing a model to estimate metabolic energy.
Rigid and non-rigid motion compensation in weight-bearing cone-beam CT of the knee using inertial measurements
Feb 24, 2021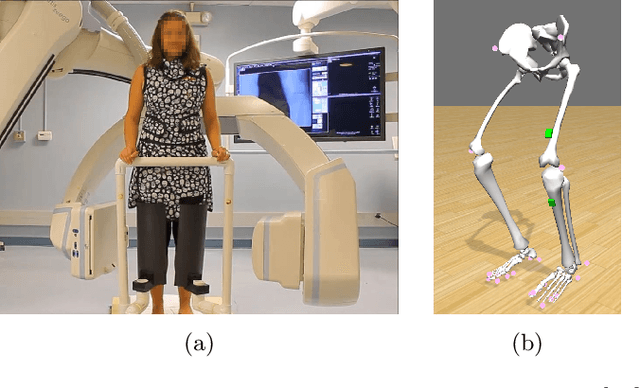
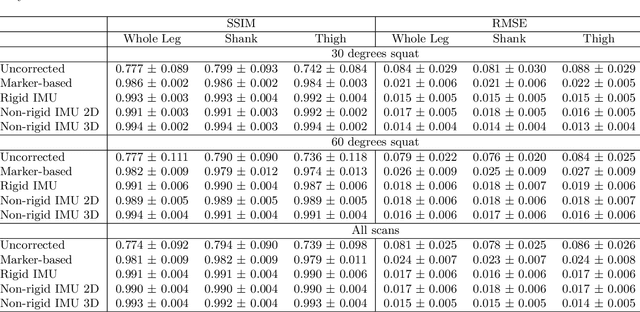
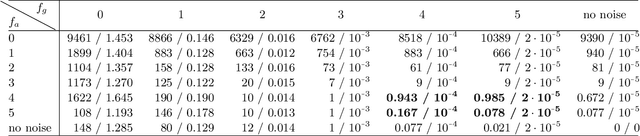
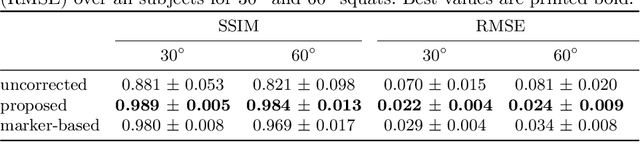
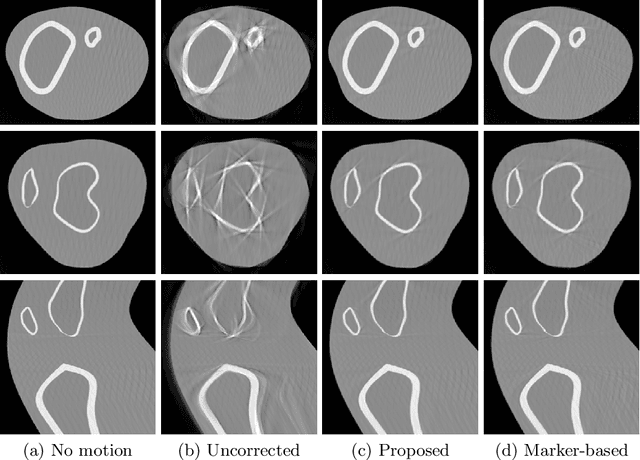
Involuntary subject motion is the main source of artifacts in weight-bearing cone-beam CT of the knee. To achieve image quality for clinical diagnosis, the motion needs to be compensated. We propose to use inertial measurement units (IMUs) attached to the leg for motion estimation. We perform a simulation study using real motion recorded with an optical tracking system. Three IMU-based correction approaches are evaluated, namely rigid motion correction, non-rigid 2D projection deformation and non-rigid 3D dynamic reconstruction. We present an initialization process based on the system geometry. With an IMU noise simulation, we investigate the applicability of the proposed methods in real applications. All proposed IMU-based approaches correct motion at least as good as a state-of-the-art marker-based approach. The structural similarity index and the root mean squared error between motion-free and motion corrected volumes are improved by 24-35% and 78-85%, respectively, compared with the uncorrected case. The noise analysis shows that the noise levels of commercially available IMUs need to be improved by a factor of $10^5$ which is currently only achieved by specialized hardware not robust enough for the application. The presented study confirms the feasibility of this novel approach and defines improvements necessary for a real application.
Inertial Measurements for Motion Compensation in Weight-bearing Cone-beam CT of the Knee
Jul 09, 2020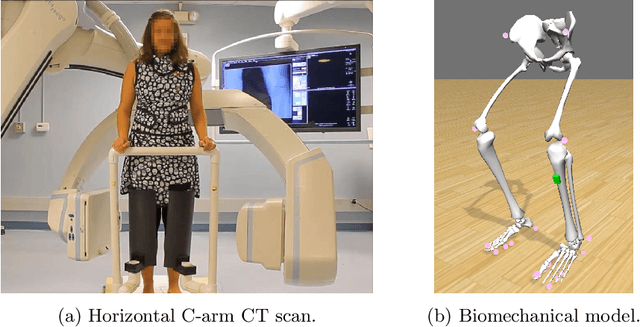

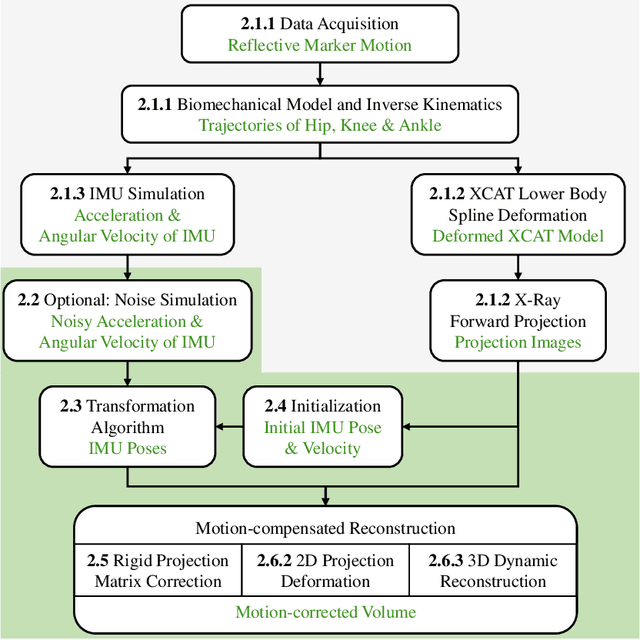
Involuntary motion during weight-bearing cone-beam computed tomography (CT) scans of the knee causes artifacts in the reconstructed volumes making them unusable for clinical diagnosis. Currently, image-based or marker-based methods are applied to correct for this motion, but often require long execution or preparation times. We propose to attach an inertial measurement unit (IMU) containing an accelerometer and a gyroscope to the leg of the subject in order to measure the motion during the scan and correct for it. To validate this approach, we present a simulation study using real motion measured with an optical 3D tracking system. With this motion, an XCAT numerical knee phantom is non-rigidly deformed during a simulated CT scan creating motion corrupted projections. A biomechanical model is animated with the same tracked motion in order to generate measurements of an IMU placed below the knee. In our proposed multi-stage algorithm, these signals are transformed to the global coordinate system of the CT scan and applied for motion compensation during reconstruction. Our proposed approach can effectively reduce motion artifacts in the reconstructed volumes. Compared to the motion corrupted case, the average structural similarity index and root mean squared error with respect to the no-motion case improved by 13-21% and 68-70%, respectively. These results are qualitatively and quantitatively on par with a state-of-the-art marker-based method we compared our approach to. The presented study shows the feasibility of this novel approach, and yields promising results towards a purely IMU-based motion compensation in C-arm CT.