 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInertial Measurements for Motion Compensation in Weight-bearing Cone-beam CT of the Knee
Paper and Code
Jul 09, 2020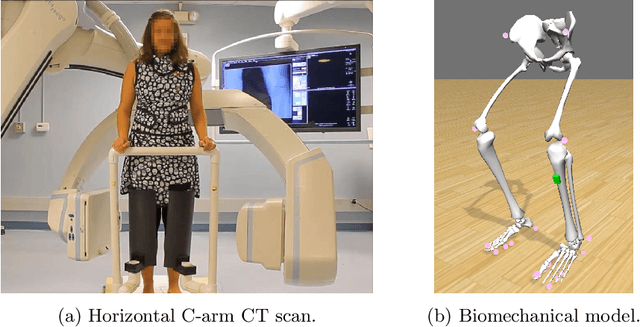
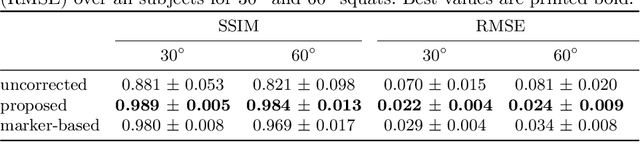
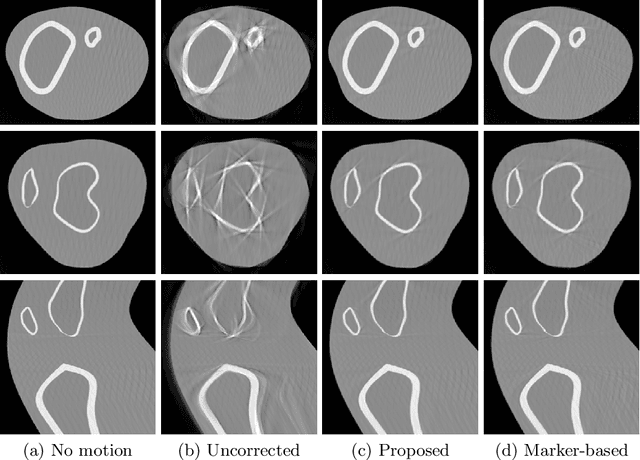

Involuntary motion during weight-bearing cone-beam computed tomography (CT) scans of the knee causes artifacts in the reconstructed volumes making them unusable for clinical diagnosis. Currently, image-based or marker-based methods are applied to correct for this motion, but often require long execution or preparation times. We propose to attach an inertial measurement unit (IMU) containing an accelerometer and a gyroscope to the leg of the subject in order to measure the motion during the scan and correct for it. To validate this approach, we present a simulation study using real motion measured with an optical 3D tracking system. With this motion, an XCAT numerical knee phantom is non-rigidly deformed during a simulated CT scan creating motion corrupted projections. A biomechanical model is animated with the same tracked motion in order to generate measurements of an IMU placed below the knee. In our proposed multi-stage algorithm, these signals are transformed to the global coordinate system of the CT scan and applied for motion compensation during reconstruction. Our proposed approach can effectively reduce motion artifacts in the reconstructed volumes. Compared to the motion corrupted case, the average structural similarity index and root mean squared error with respect to the no-motion case improved by 13-21% and 68-70%, respectively. These results are qualitatively and quantitatively on par with a state-of-the-art marker-based method we compared our approach to. The presented study shows the feasibility of this novel approach, and yields promising results towards a purely IMU-based motion compensation in C-arm CT.