 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-temporal crack segmentation in concrete structure using deep learning approaches
Nov 07, 2024Cracks are among the earliest indicators of deterioration in concrete structures. Early automatic detection of these cracks can significantly extend the lifespan of critical infrastructures, such as bridges, buildings, and tunnels, while simultaneously reducing maintenance costs and facilitating efficient structural health monitoring. This study investigates whether leveraging multi-temporal data for crack segmentation can enhance segmentation quality. Therefore, we compare a Swin UNETR trained on multi-temporal data with a U-Net trained on mono-temporal data to assess the effect of temporal information compared with conventional single-epoch approaches. To this end, a multi-temporal dataset comprising 1356 images, each with 32 sequential crack propagation images, was created. After training the models, experiments were conducted to analyze their generalization ability, temporal consistency, and segmentation quality. The multi-temporal approach consistently outperformed its mono-temporal counterpart, achieving an IoU of $82.72\%$ and a F1-score of $90.54\%$, representing a significant improvement over the mono-temporal model's IoU of $76.69\%$ and F1-score of $86.18\%$, despite requiring only half of the trainable parameters. The multi-temporal model also displayed a more consistent segmentation quality, with reduced noise and fewer errors. These results suggest that temporal information significantly enhances the performance of segmentation models, offering a promising solution for improved crack detection and the long-term monitoring of concrete structures, even with limited sequential data.
A Review on Viewpoints and Path-planning for UAV-based 3D Reconstruction
May 07, 2022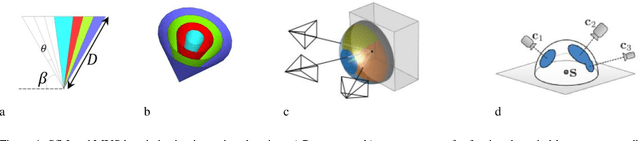
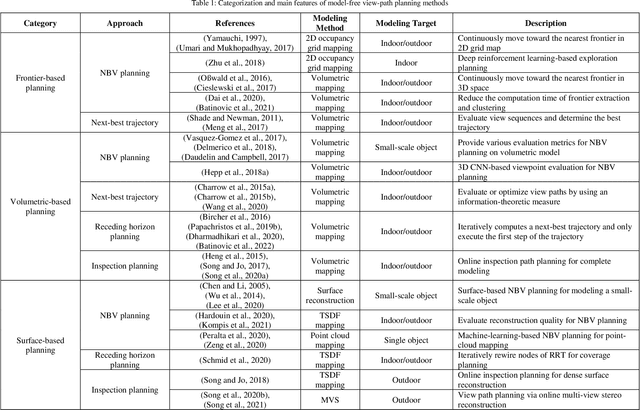
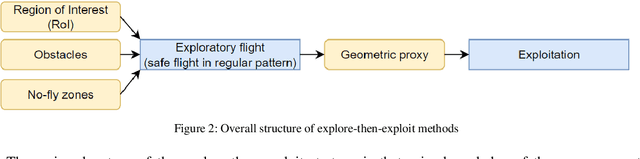
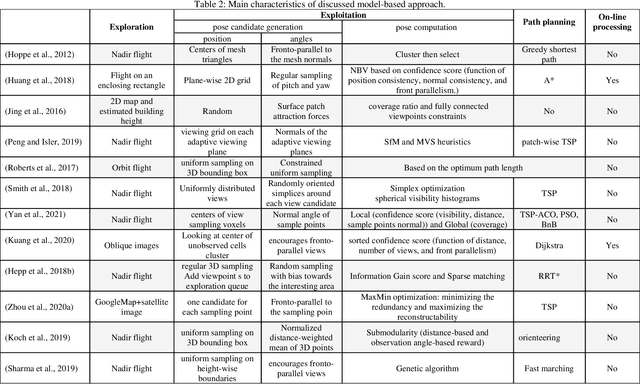
Unmanned aerial vehicles (UAVs) are widely used platforms to carry data capturing sensors for various applications. The reason for this success can be found in many aspects: the high maneuverability of the UAVs, the capability of performing autonomous data acquisition, flying at different heights, and the possibility to reach almost any vantage point. The selection of appropriate viewpoints and planning the optimum trajectories of UAVs is an emerging topic that aims at increasing the automation, efficiency and reliability of the data capturing process to achieve a dataset with desired quality. On the other hand, 3D reconstruction using the data captured by UAVs is also attracting attention in research and industry. This review paper investigates a wide range of model-free and model-based algorithms for viewpoint and path planning for 3D reconstruction of large-scale objects. The analyzed approaches are limited to those that employ a single-UAV as a data capturing platform for outdoor 3D reconstruction purposes. In addition to discussing the evaluation strategies, this paper also highlights the innovations and limitations of the investigated approaches. It concludes with a critical analysis of the existing challenges and future research perspectives.
Change Detection between Multimodal Remote Sensing Data Using Siamese CNN
Jul 25, 2018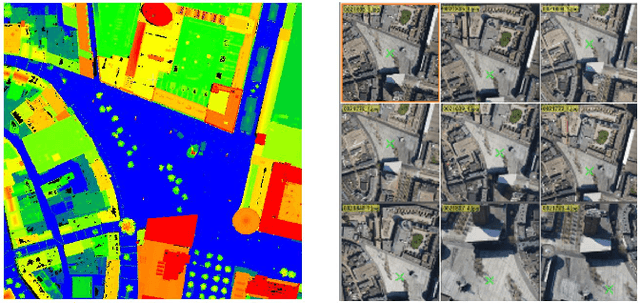
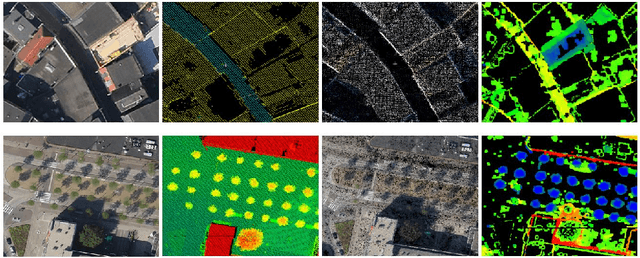
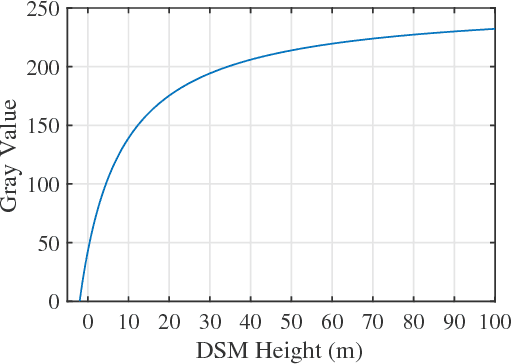
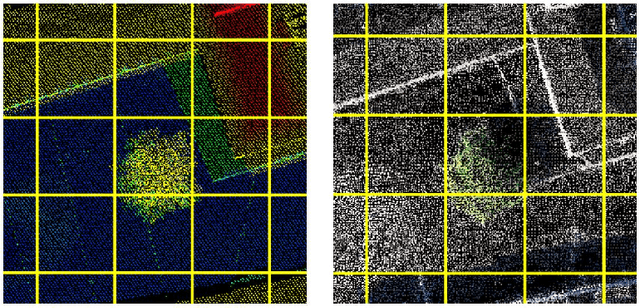
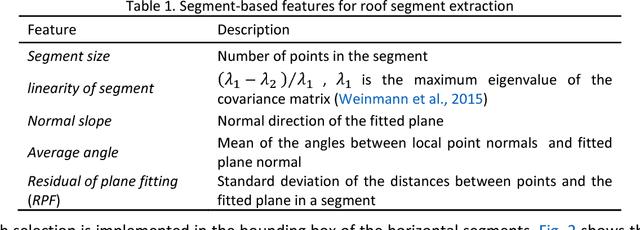
Detecting topographic changes in the urban environment has always been an important task for urban planning and monitoring. In practice, remote sensing data are often available in different modalities and at different time epochs. Change detection between multimodal data can be very challenging since the data show different characteristics. Given 3D laser scanning point clouds and 2D imagery from different epochs, this paper presents a framework to detect building and tree changes. First, the 2D and 3D data are transformed to image patches, respectively. A Siamese CNN is then employed to detect candidate changes between the two epochs. Finally, the candidate patch-based changes are grouped and verified as individual object changes. Experiments on the urban data show that 86.4\% of patch pairs can be correctly classified by the model.
Patch-based Evaluation of Dense Image Matching Quality
Jul 25, 2018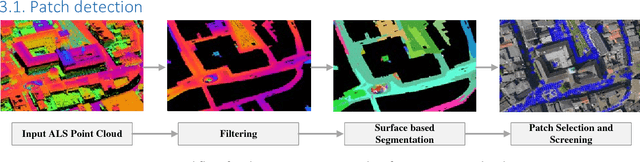


Airborne laser scanning and photogrammetry are two main techniques to obtain 3D data representing the object surface. Due to the high cost of laser scanning, we want to explore the potential of using point clouds derived by dense image matching (DIM), as effective alternatives to laser scanning data. We present a framework to evaluate point clouds from dense image matching and derived Digital Surface Models (DSM) based on automatically extracted sample patches. Dense matching error and noise level are evaluated quantitatively at both the local level and whole block level. Experiments show that the optimal vertical accuracy achieved by dense matching is as follows: the mean offset to the reference data is 0.1 Ground Sampling Distance (GSD); the maximum offset goes up to 1.0 GSD. When additional oblique images are used in dense matching, the mean deviation, the variation of mean deviation and the level of random noise all get improved. We also detect a bias between the point cloud and DSM from a single photogrammetric workflow. This framework also allows to reveal inhomogeneity in the distribution of the dense matching errors due to over-fitted BBA network. Meanwhile, suggestions are given on the photogrammetric quality control.
* 16 pages
Towards Automated Cadastral Boundary Delineation from UAV Data
Sep 06, 2017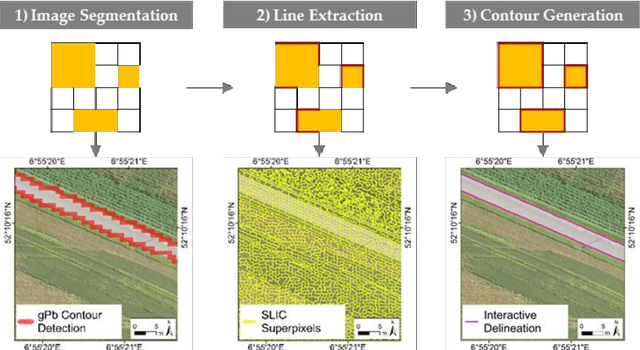
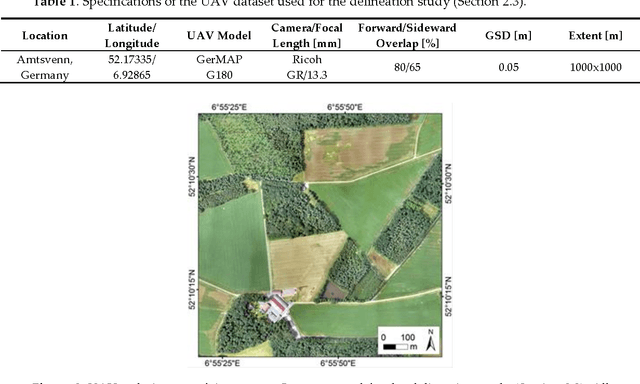
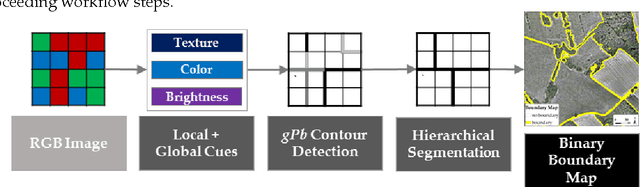
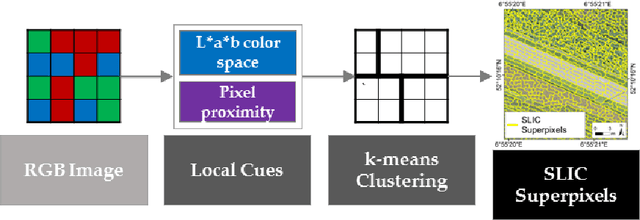
Unmanned aerial vehicles (UAV) are evolving as an alternative tool to acquire land tenure data. UAVs can capture geospatial data at high quality and resolution in a cost-effective, transparent and flexible manner, from which visible land parcel boundaries, i.e., cadastral boundaries are delineable. This delineation is to no extent automated, even though physical objects automatically retrievable through image analysis methods mark a large portion of cadastral boundaries. This study proposes (i) a workflow that automatically extracts candidate cadastral boundaries from UAV orthoimages and (ii) a tool for their semi-automatic processing to delineate final cadastral boundaries. The workflow consists of two state-of-the-art computer vision methods, namely gPb contour detection and SLIC superpixels that are transferred to remote sensing in this study. The tool combines the two methods, allows a semi-automatic final delineation and is implemented as a publicly available QGIS plugin. The approach does not yet aim to provide a comparable alternative to manual cadastral mapping procedures. However, the methodological development of the tool towards this goal is developed in this paper. A study with 13 volunteers investigates the design and implementation of the approach and gathers initial qualitative as well as quantitate results. The study revealed points for improvement, which are prioritized based on the study results and which will be addressed in future work.