 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-temporal crack segmentation in concrete structure using deep learning approaches
Nov 07, 2024Cracks are among the earliest indicators of deterioration in concrete structures. Early automatic detection of these cracks can significantly extend the lifespan of critical infrastructures, such as bridges, buildings, and tunnels, while simultaneously reducing maintenance costs and facilitating efficient structural health monitoring. This study investigates whether leveraging multi-temporal data for crack segmentation can enhance segmentation quality. Therefore, we compare a Swin UNETR trained on multi-temporal data with a U-Net trained on mono-temporal data to assess the effect of temporal information compared with conventional single-epoch approaches. To this end, a multi-temporal dataset comprising 1356 images, each with 32 sequential crack propagation images, was created. After training the models, experiments were conducted to analyze their generalization ability, temporal consistency, and segmentation quality. The multi-temporal approach consistently outperformed its mono-temporal counterpart, achieving an IoU of $82.72\%$ and a F1-score of $90.54\%$, representing a significant improvement over the mono-temporal model's IoU of $76.69\%$ and F1-score of $86.18\%$, despite requiring only half of the trainable parameters. The multi-temporal model also displayed a more consistent segmentation quality, with reduced noise and fewer errors. These results suggest that temporal information significantly enhances the performance of segmentation models, offering a promising solution for improved crack detection and the long-term monitoring of concrete structures, even with limited sequential data.
A Review on Viewpoints and Path-planning for UAV-based 3D Reconstruction
May 07, 2022
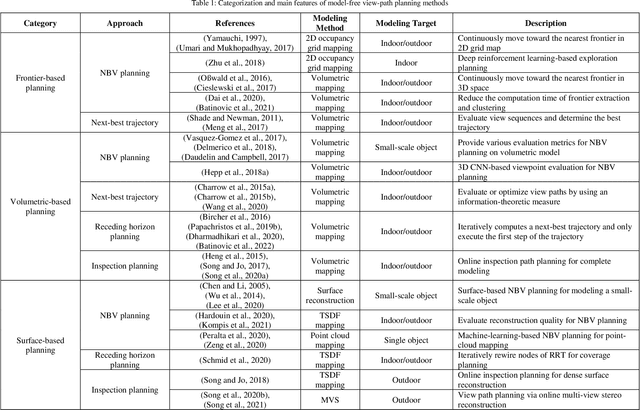
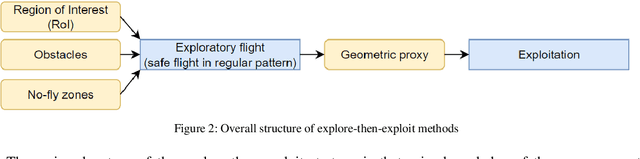
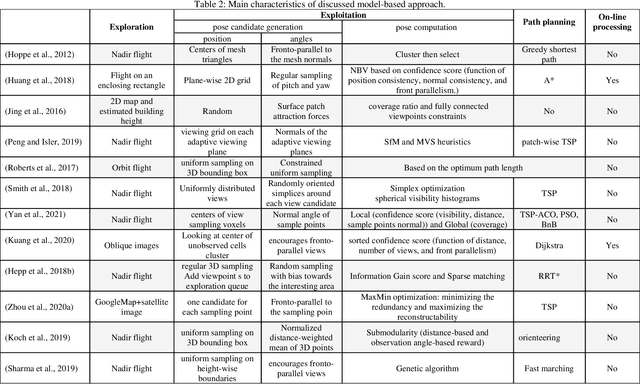
Unmanned aerial vehicles (UAVs) are widely used platforms to carry data capturing sensors for various applications. The reason for this success can be found in many aspects: the high maneuverability of the UAVs, the capability of performing autonomous data acquisition, flying at different heights, and the possibility to reach almost any vantage point. The selection of appropriate viewpoints and planning the optimum trajectories of UAVs is an emerging topic that aims at increasing the automation, efficiency and reliability of the data capturing process to achieve a dataset with desired quality. On the other hand, 3D reconstruction using the data captured by UAVs is also attracting attention in research and industry. This review paper investigates a wide range of model-free and model-based algorithms for viewpoint and path planning for 3D reconstruction of large-scale objects. The analyzed approaches are limited to those that employ a single-UAV as a data capturing platform for outdoor 3D reconstruction purposes. In addition to discussing the evaluation strategies, this paper also highlights the innovations and limitations of the investigated approaches. It concludes with a critical analysis of the existing challenges and future research perspectives.