 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTumorMap: A Laser-based Surgical Platform for 3D Tumor Mapping and Fully-Automated Tumor Resection
Nov 07, 2025Surgical resection of malignant solid tumors is critically dependent on the surgeon's ability to accurately identify pathological tissue and remove the tumor while preserving surrounding healthy structures. However, building an intraoperative 3D tumor model for subsequent removal faces major challenges due to the lack of high-fidelity tumor reconstruction, difficulties in developing generalized tissue models to handle the inherent complexities of tumor diagnosis, and the natural physical limitations of bimanual operation, physiologic tremor, and fatigue creep during surgery. To overcome these challenges, we introduce "TumorMap", a surgical robotic platform to formulate intraoperative 3D tumor boundaries and achieve autonomous tissue resection using a set of multifunctional lasers. TumorMap integrates a three-laser mechanism (optical coherence tomography, laser-induced endogenous fluorescence, and cutting laser scalpel) combined with deep learning models to achieve fully-automated and noncontact tumor resection. We validated TumorMap in murine osteoscarcoma and soft-tissue sarcoma tumor models, and established a novel histopathological workflow to estimate sensor performance. With submillimeter laser resection accuracy, we demonstrated multimodal sensor-guided autonomous tumor surgery without any human intervention.
ROB 204: Introduction to Human-Robot Systems at the University of Michigan, Ann Arbor
May 23, 2024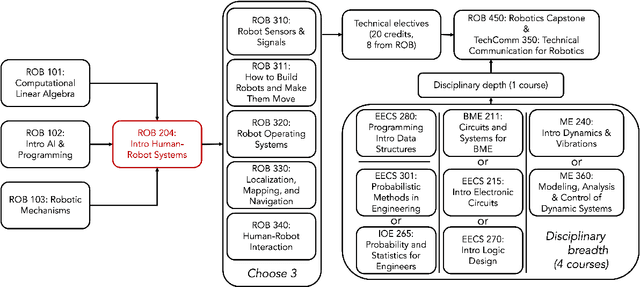

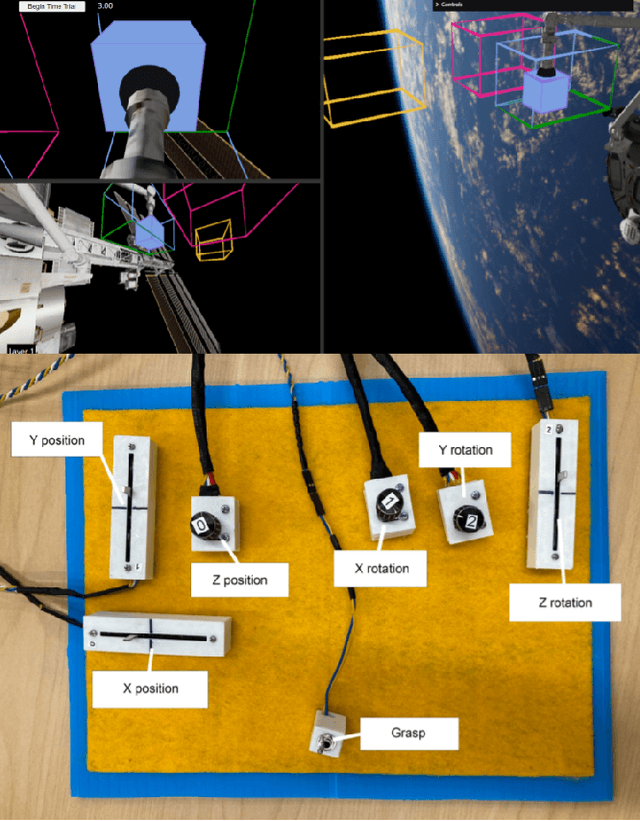
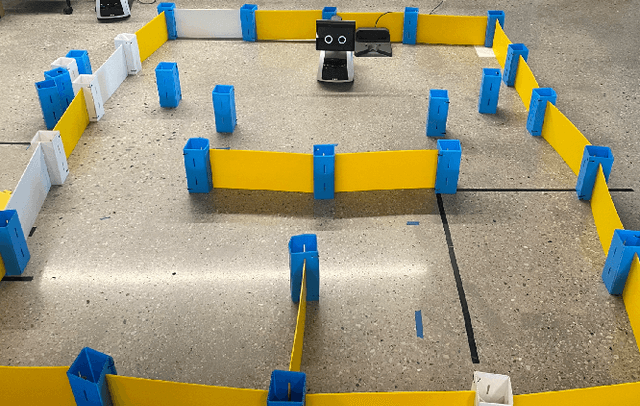
The University of Michigan Robotics program focuses on the study of embodied intelligence that must sense, reason, act, and work with people to improve quality of life and productivity equitably across society. ROB 204, part of the core curriculum towards the undergraduate degree in Robotics, introduces students to topics that enable conceptually designing a robotic system to address users' needs from a sociotechnical context. Students are introduced to human-robot interaction (HRI) concepts and the process for socially-engaged design with a Learn-Reinforce-Integrate approach. In this paper, we discuss the course topics and our teaching methodology, and provide recommendations for delivering this material. Overall, students leave the course with a new understanding and appreciation for how human capabilities can inform requirements for a robotics system, how humans can interact with a robot, and how to assess the usability of robotic systems.
Toward Autonomous Robotic Micro-Suturing using Optical Coherence Tomography Calibration and Path Planning
Mar 04, 2020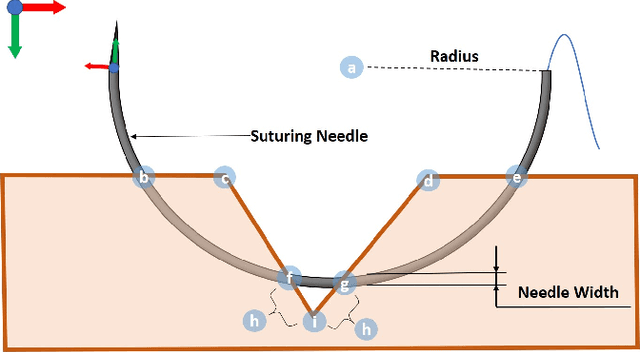
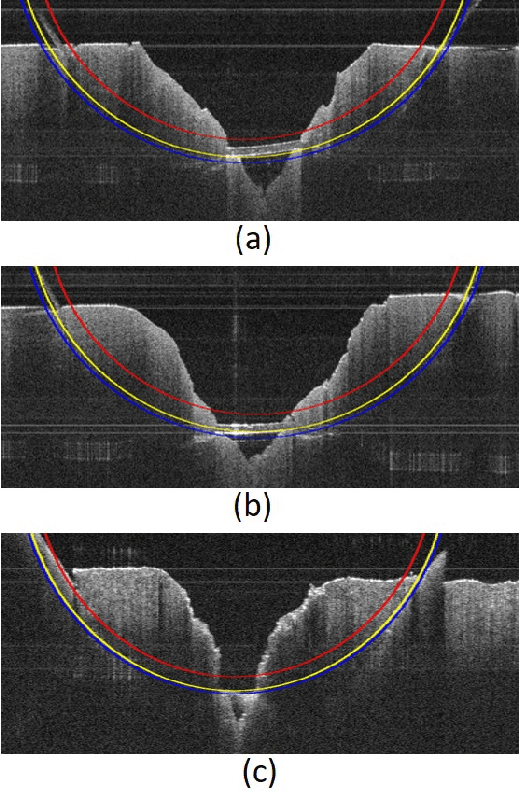
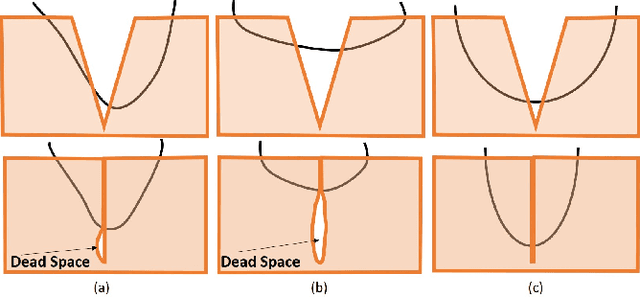
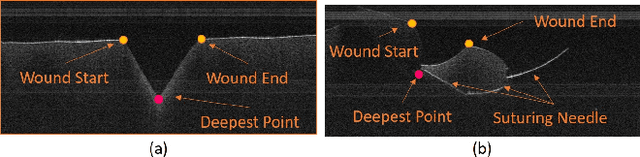
Robotic automation has the potential to assist human surgeons in performing suturing tasks in microsurgery, and in order to do so a robot must be able to guide a needle with sub-millimeter precision through soft tissue. This paper presents a robotic suturing system that uses 3D optical coherence tomography (OCT) system for imaging feedback. Calibration of the robot-OCT and robot-needle transforms, wound detection, keypoint identification, and path planning are all performed automatically. The calibration method handles pose uncertainty when the needle is grasped using a variant of iterative closest points. The path planner uses the identified wound shape to calculate needle entry and exit points to yield an evenly-matched wound shape after closure. Experiments on tissue phantoms and animal tissue demonstrate that the system can pass a suture needle through wounds with 0.27 mm overall accuracy in achieving the planned entry and exit points.