 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBackground Subtraction with Drift Correction for Bistatic Radar Reflectivity Measurements
Jan 20, 2026Fundamental research on bistatic radar reflectivity is highly relevant, e.g., to the upcoming mobile communication standard 6G, which includes integrated sensing and communication (ISAC). We introduce a model for correcting instrumentation drift during bistatic radar measurements in anechoic chambers. Usually, background subtraction is applied with the goal to yield the target reflection signal as best as possible while coherently subtracting all signals which were present in both the foreground and background measurement. However, even slight incoherences between the foreground and background measurement process deteriorate the result. We analyze these effects in real measurements in the frequency range 2-18 GHz, taken with the Bistatic Radar (BIRA) measurement facility at TU Ilmenau. Applying our proposed drift correction model, we demonstrate up to 40 dB improvement for the removal of direct line-of-sight antenna crosstalk over the state of the art.
Flow reconstruction in time-varying geometries using graph neural networks
Nov 13, 2024



The paper presents a Graph Attention Convolutional Network (GACN) for flow reconstruction from very sparse data in time-varying geometries. The model incorporates a feature propagation algorithm as a preprocessing step to handle extremely sparse inputs, leveraging information from neighboring nodes to initialize missing features. In addition, a binary indicator is introduced as a validity mask to distinguish between the original and propagated data points, enabling more effective learning from sparse inputs. Trained on a unique data set of Direct Numerical Simulations (DNS) of a motored engine at a technically relevant operating condition, the GACN shows robust performance across different resolutions and domain sizes and can effectively handle unstructured data and variable input sizes. The model is tested on previously unseen DNS data as well as on an experimental data set from Particle Image Velocimetry (PIV) measurements that were not considered during training. A comparative analysis shows that the GACN consistently outperforms both a conventional Convolutional Neural Network (CNN) and cubic interpolation methods on the DNS and PIV test sets by achieving lower reconstruction errors and better capturing fine-scale turbulent structures. In particular, the GACN effectively reconstructs flow fields from domains up to 14 times larger than those observed during training, with the performance advantage increasing for larger domains.
Low-cost Sensor Glove with Force Feedback for Learning from Demonstrations using Probabilistic Trajectory Representations
Oct 12, 2015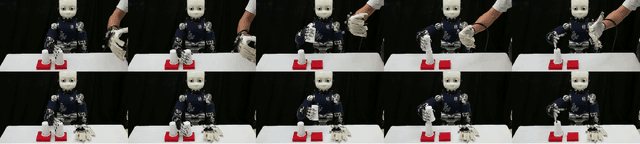
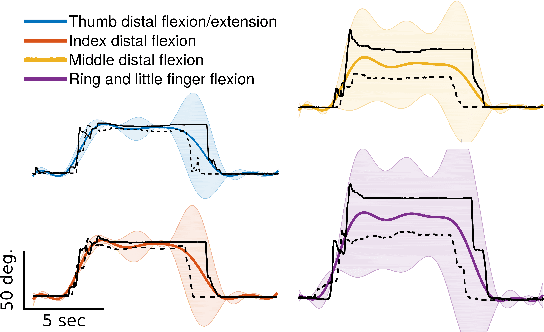
Sensor gloves are popular input devices for a large variety of applications including health monitoring, control of music instruments, learning sign language, dexterous computer interfaces, and tele-operating robot hands. Many commercial products as well as low-cost open source projects have been developed. We discuss here how low-cost (approx. 250 EUROs) sensor gloves with force feedback can be build, provide an open source software interface for Matlab and present first results in learning object manipulation skills through imitation learning on the humanoid robot iCub.