Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLow-cost Sensor Glove with Force Feedback for Learning from Demonstrations using Probabilistic Trajectory Representations
Paper and Code
Oct 12, 2015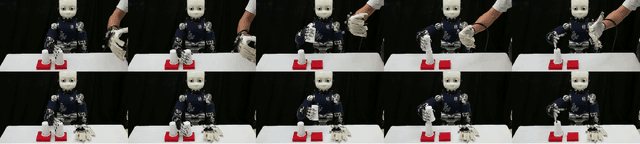
Sensor gloves are popular input devices for a large variety of applications including health monitoring, control of music instruments, learning sign language, dexterous computer interfaces, and tele-operating robot hands. Many commercial products as well as low-cost open source projects have been developed. We discuss here how low-cost (approx. 250 EUROs) sensor gloves with force feedback can be build, provide an open source software interface for Matlab and present first results in learning object manipulation skills through imitation learning on the humanoid robot iCub.
* 3 pages, 3 figures. Workshop paper of the International Conference on
Robotics and Automation (ICRA 2015)
View paper on