 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Evaluation and Ranking of Different Voting Schemes for Improved Visual Place Recognition
May 09, 2023Visual Place Recognition has recently seen a surge of endeavours utilizing different ensemble approaches to improve VPR performance. Ideas like multi-process fusion or switching involve combining different VPR techniques together, utilizing different strategies. One major aspect often common to many of these strategies is voting. Voting is widely used in many ensemble methods, so it is potentially a relevant subject to explore in terms of its application and significance for improving VPR performance. This paper attempts to looks into detail and analyze a variety of voting schemes to evaluate which voting technique is optimal for an ensemble VPR set up. We take inspiration from a variety of voting schemes that exist and are widely employed in other research fields such as politics and sociology. The idea is inspired by an observation that different voting methods result in different outcomes for the same type of data and each voting scheme is utilized for specific cases in different academic fields. Some of these voting schemes include Condorcet voting, Broda Count and Plurality voting. Voting employed in any aspect requires that a fair system be established, that outputs the best and most favourable results which in our case would involve improving VPR performance. We evaluate some of these voting techniques in a standardized testing of different VPR techniques, using a variety of VPR data sets. We aim to determine whether a single optimal voting scheme exists or, much like in other fields of research, the selection of a voting technique is relative to its application and environment. We also aim to propose a ranking of these different voting methods from best to worst according to our results as this will allow for better selection of voting schemes.
A Complementarity-Based Switch-Fuse System for Improved Visual Place Recognition
Mar 01, 2023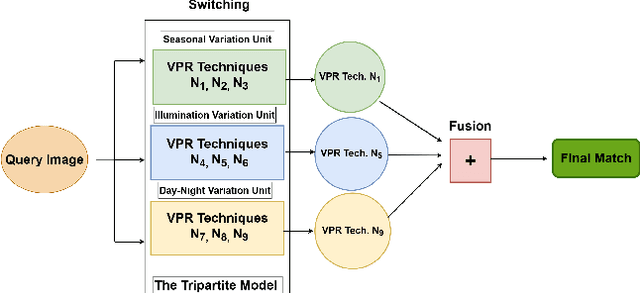
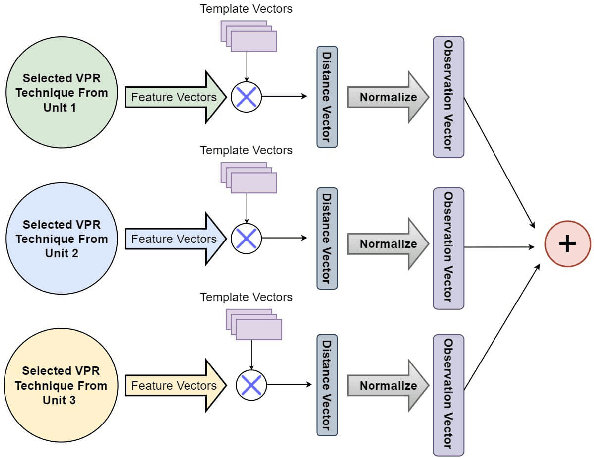
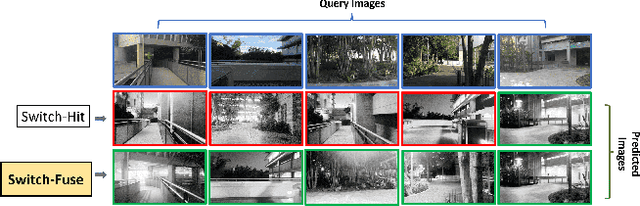
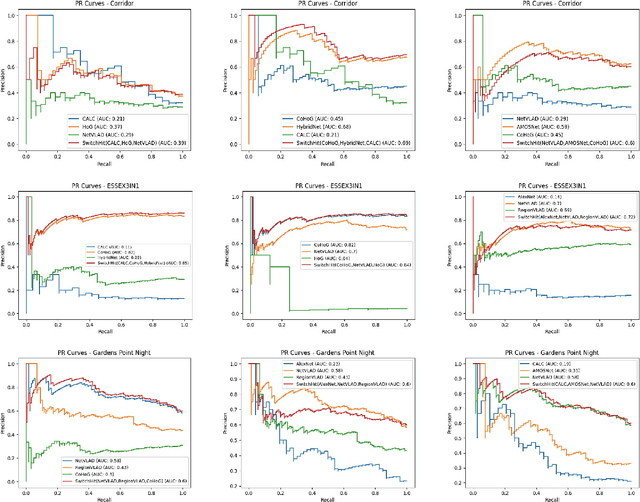
Recently several fusion and switching based approaches have been presented to solve the problem of Visual Place Recognition. In spite of these systems demonstrating significant boost in VPR performance they each have their own set of limitations. The multi-process fusion systems usually involve employing brute force and running all available VPR techniques simultaneously while the switching method attempts to negate this practise by only selecting the best suited VPR technique for given query image. But switching does fail at times when no available suitable technique can be identified. An innovative solution would be an amalgamation of the two otherwise discrete approaches to combine their competitive advantages while negating their shortcomings. The proposed, Switch-Fuse system, is an interesting way to combine both the robustness of switching VPR techniques based on complementarity and the force of fusing the carefully selected techniques to significantly improve performance. Our system holds a structure superior to the basic fusion methods as instead of simply fusing all or any random techniques, it is structured to first select the best possible VPR techniques for fusion, according to the query image. The system combines two significant processes, switching and fusing VPR techniques, which together as a hybrid model substantially improve performance on all major VPR data sets illustrated using PR curves.
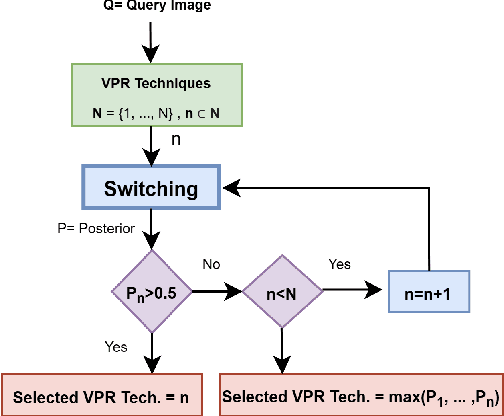
SwitchHit: A Probabilistic, Complementarity-Based Switching System for Improved Visual Place Recognition in Changing Environments
Mar 01, 2022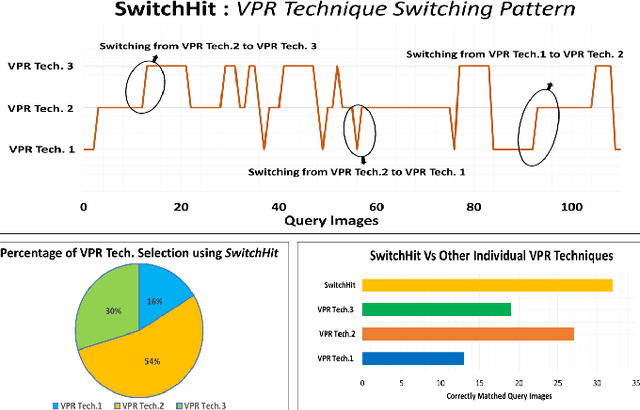
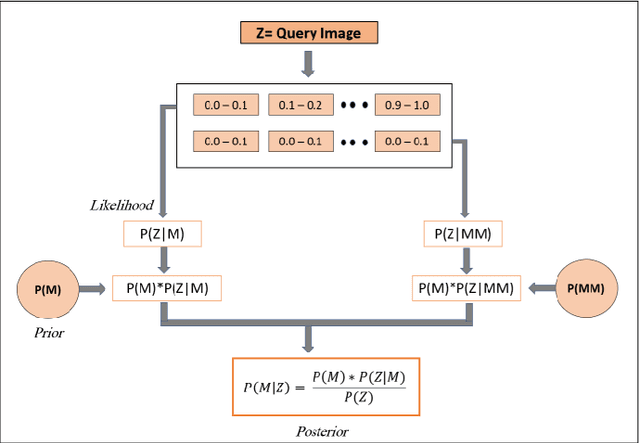
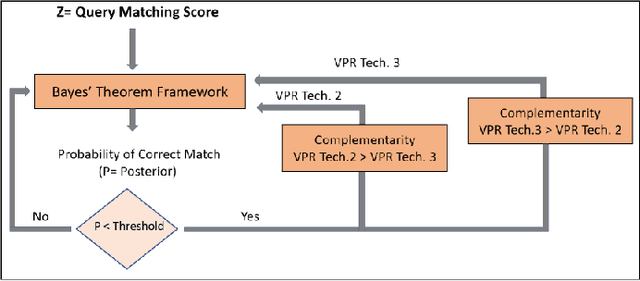
Visual place recognition (VPR), a fundamental task in computer vision and robotics, is the problem of identifying a place mainly based on visual information. Viewpoint and appearance changes, such as due to weather and seasonal variations, make this task challenging. Currently, there is no universal VPR technique that can work in all types of environments, on a variety of robotic platforms, and under a wide range of viewpoint and appearance changes. Recent work has shown the potential of combining different VPR methods intelligently by evaluating complementarity for some specific VPR datasets to achieve better performance. This, however, requires ground truth information (correct matches) which is not available when a robot is deployed in a real-world scenario. Moreover, running multiple VPR techniques in parallel may be prohibitive for resource-constrained embedded platforms. To overcome these limitations, this paper presents a probabilistic complementarity based switching VPR system, SwitchHit. Our proposed system consists of multiple VPR techniques, however, it does not simply run all techniques at once, rather predicts the probability of correct match for an incoming query image and dynamically switches to another complementary technique if the probability of correctly matching the query is below a certain threshold. This innovative use of multiple VPR techniques allow our system to be more efficient and robust than other combined VPR approaches employing brute force and running multiple VPR techniques at once. Thus making it more suitable for resource constrained embedded systems and achieving an overall superior performance from what any individual VPR method in the system could have by achieved running independently.
Improving Visual Place Recognition Performance by Maximising Complementarity
Feb 16, 2021
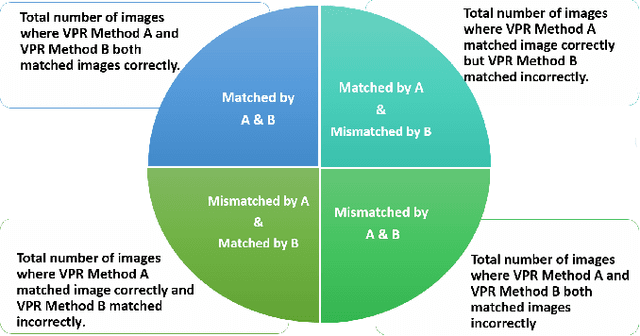
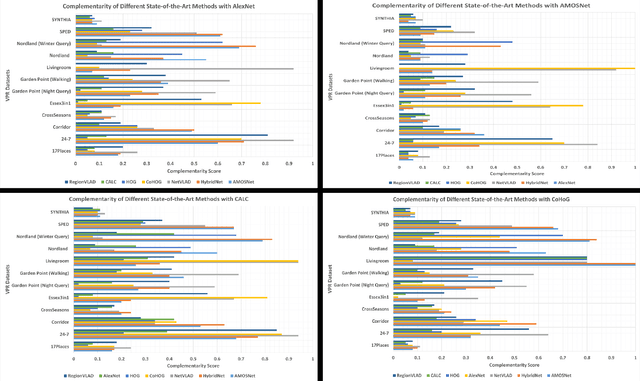
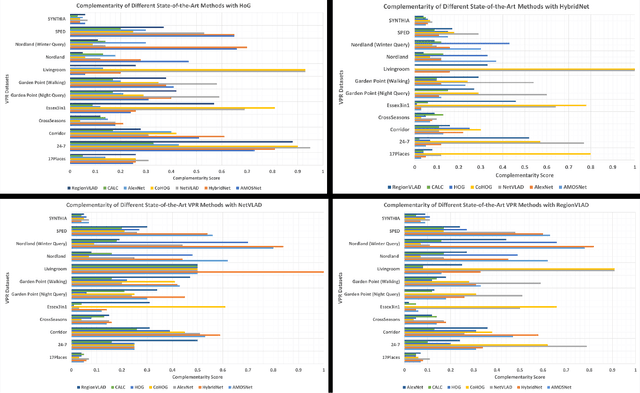
Visual place recognition (VPR) is the problem of recognising a previously visited location using visual information. Many attempts to improve the performance of VPR methods have been made in the literature. One approach that has received attention recently is the multi-process fusion where different VPR methods run in parallel and their outputs are combined in an effort to achieve better performance. The multi-process fusion, however, does not have a well-defined criterion for selecting and combining different VPR methods from a wide range of available options. To the best of our knowledge, this paper investigates the complementarity of state-of-the-art VPR methods systematically for the first time and identifies those combinations which can result in better performance. The paper presents a well-defined framework which acts as a sanity check to find the complementarity between two techniques by utilising a McNemar's test-like approach. The framework allows estimation of upper and lower complementarity bounds for the VPR techniques to be combined, along with an estimate of maximum VPR performance that may be achieved. Based on this framework, results are presented for eight state-of-the-art VPR methods on ten widely-used VPR datasets showing the potential of different combinations of techniques for achieving better performance.
Visual Place Recognition for Aerial Robotics: Exploring Accuracy-Computation Trade-off for Local Image Descriptors
Aug 01, 2019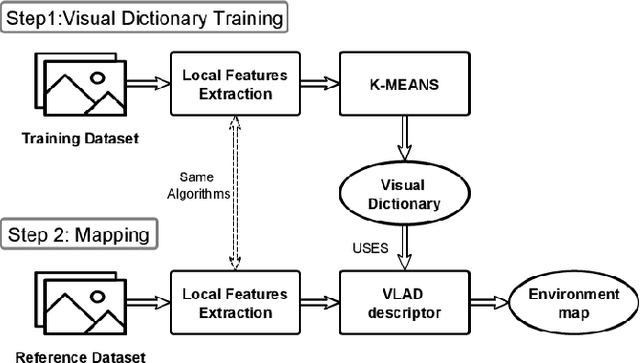
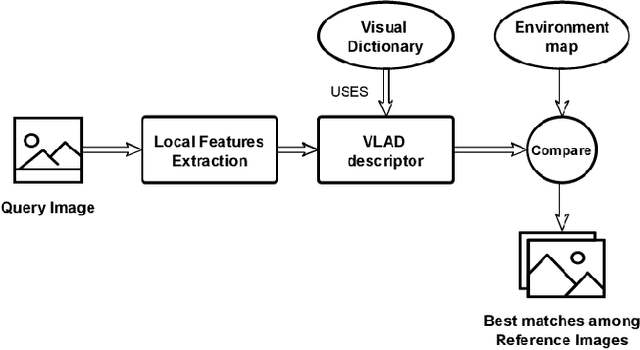
Visual Place Recognition (VPR) is a fundamental yet challenging task for small Unmanned Aerial Vehicle (UAV). The core reasons are the extreme viewpoint changes, and limited computational power onboard a UAV which restricts the applicability of robust but computation intensive state-of-the-art VPR methods. In this context, a viable approach is to use local image descriptors for performing VPR as these can be computed relatively efficiently without the need of any special hardware, such as a GPU. However, the choice of a local feature descriptor is not trivial and calls for a detailed investigation as there is a trade-off between VPR accuracy and the required computational effort. To fill this research gap, this paper examines the performance of several state-of-the-art local feature descriptors, both from accuracy and computational perspectives, specifically for VPR application utilizing standard aerial datasets. The presented results confirm that a trade-off between accuracy and computational effort is inevitable while executing VPR on resource-constrained hardware.