 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVisual Place Recognition for Aerial Robotics: Exploring Accuracy-Computation Trade-off for Local Image Descriptors
Paper and Code
Aug 01, 2019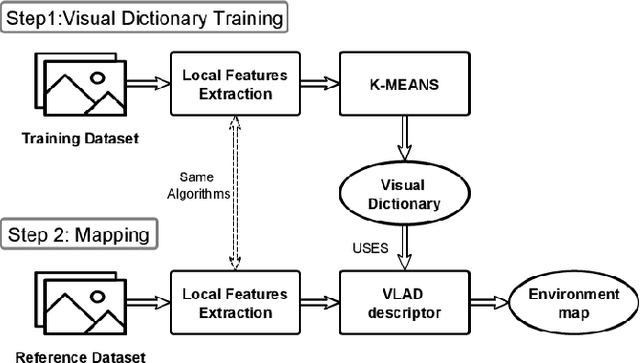
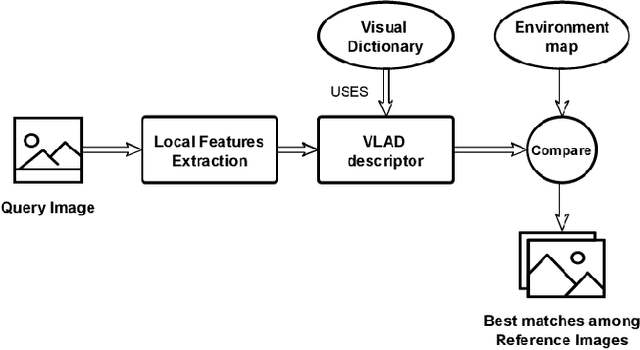
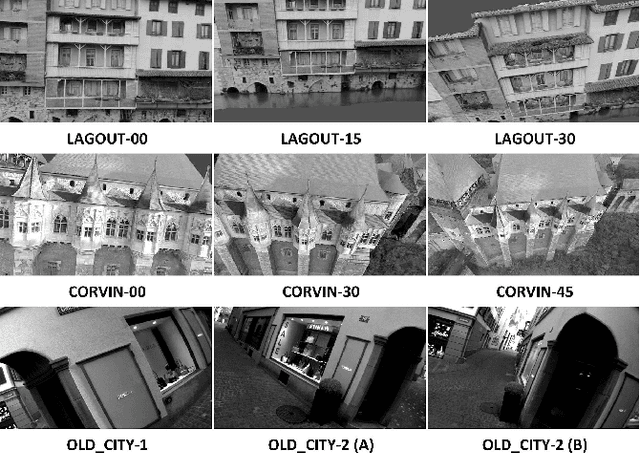
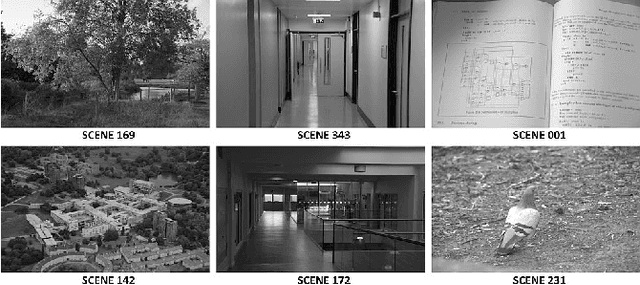
Visual Place Recognition (VPR) is a fundamental yet challenging task for small Unmanned Aerial Vehicle (UAV). The core reasons are the extreme viewpoint changes, and limited computational power onboard a UAV which restricts the applicability of robust but computation intensive state-of-the-art VPR methods. In this context, a viable approach is to use local image descriptors for performing VPR as these can be computed relatively efficiently without the need of any special hardware, such as a GPU. However, the choice of a local feature descriptor is not trivial and calls for a detailed investigation as there is a trade-off between VPR accuracy and the required computational effort. To fill this research gap, this paper examines the performance of several state-of-the-art local feature descriptors, both from accuracy and computational perspectives, specifically for VPR application utilizing standard aerial datasets. The presented results confirm that a trade-off between accuracy and computational effort is inevitable while executing VPR on resource-constrained hardware.