 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGuiltyWalker: Distance to illicit nodes in the Bitcoin network
Feb 10, 2021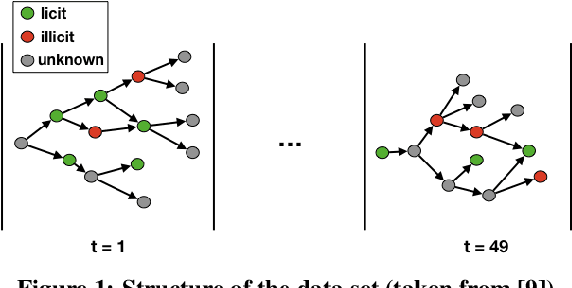
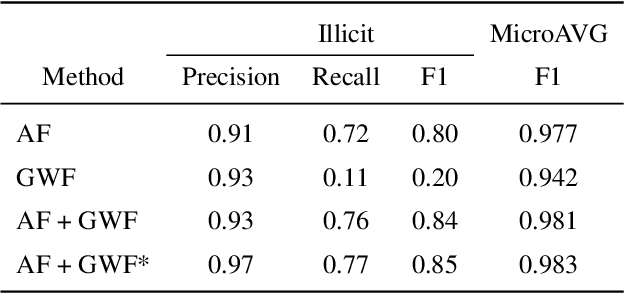
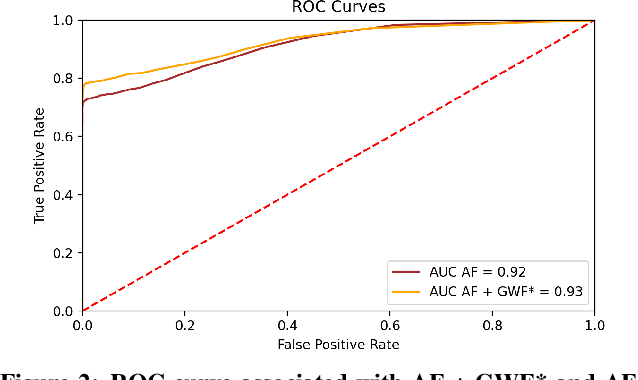
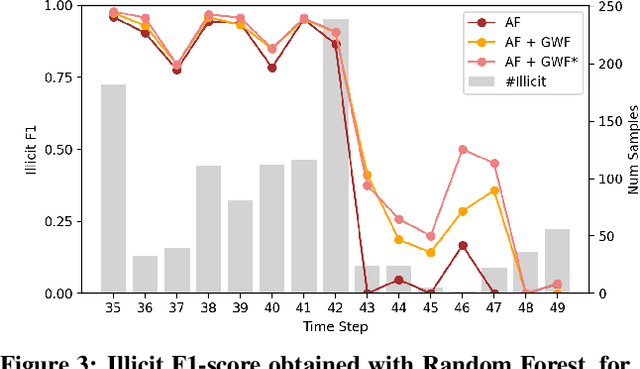
Money laundering is a global phenomenon with wide-reaching social and economic consequences. Cryptocurrencies are particularly susceptible due to the lack of control by authorities and their anonymity. Thus, it is important to develop new techniques to detect and prevent illicit cryptocurrency transactions. In our work, we propose new features based on the structure of the graph and past labels to boost the performance of machine learning methods to detect money laundering. Our method, GuiltyWalker, performs random walks on the bitcoin transaction graph and computes features based on the distance to illicit transactions. We combine these new features with features proposed by Weber et al. and observe an improvement of about 5pp regarding illicit classification. Namely, we observe that our proposed features are particularly helpful during a black market shutdown, where the algorithm by Weber et al. was low performing.
Machine learning methods to detect money laundering in the Bitcoin blockchain in the presence of label scarcity
May 29, 2020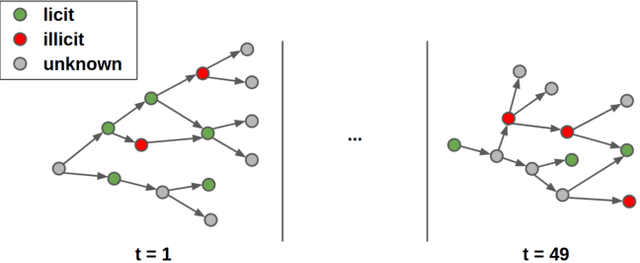
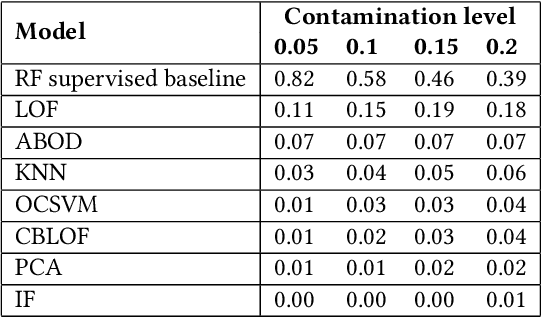
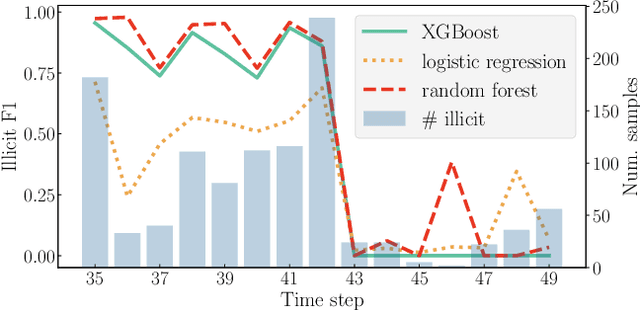
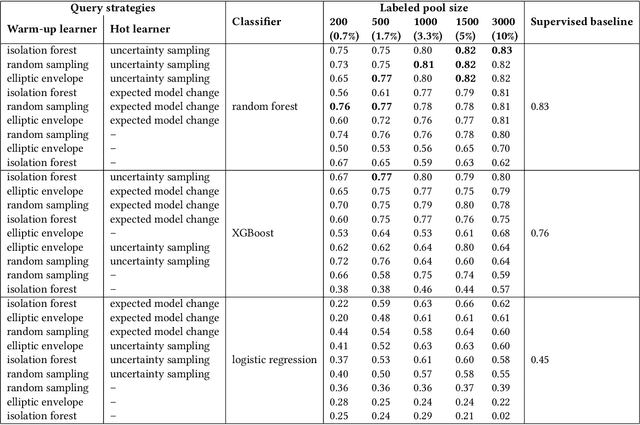
Every year, criminals launder billions of dollars acquired from serious felonies (e.g., terrorism, drug smuggling, or human trafficking) harming countless people and economies. Cryptocurrencies, in particular, have developed as a haven for money laundering activity. Machine Learning can be used to detect these illicit patterns. However, labels are so scarce that traditional supervised algorithms are inapplicable. Here, we address money laundering detection assuming minimal access to labels. First, we show that existing state-of-the-art solutions using unsupervised anomaly detection methods are inadequate to detect the illicit patterns in a real Bitcoin transaction dataset. Then, we show that our proposed active learning solution is capable of matching the performance of a fully supervised baseline by using just 5\% of the labels. This solution mimics a typical real-life situation in which a limited number of labels can be acquired through manual annotation by experts.
Exploring time-series motifs through DTW-SOM
Apr 17, 2020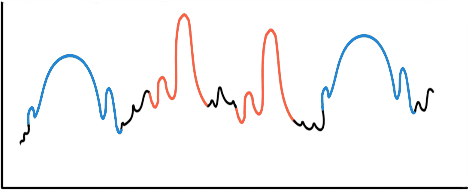
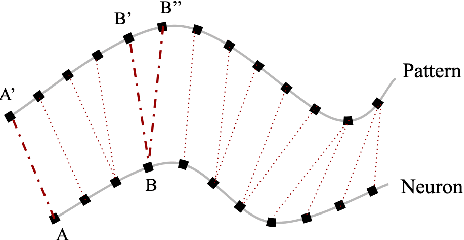
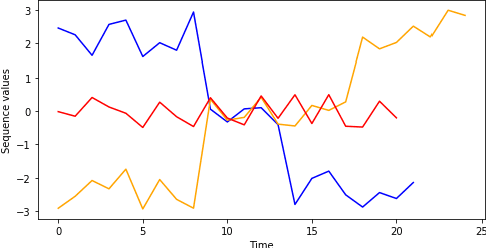
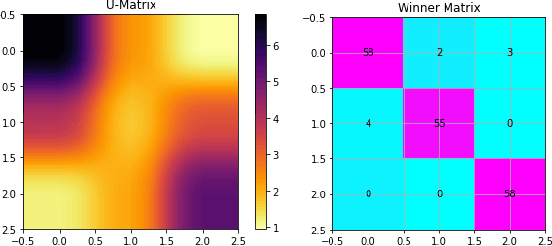
Motif discovery is a fundamental step in data mining tasks for time-series data such as clustering, classification and anomaly detection. Even though many papers have addressed the problem of how to find motifs in time-series by proposing new motif discovery algorithms, not much work has been done on the exploration of the motifs extracted by these algorithms. In this paper, we argue that visually exploring time-series motifs computed by motif discovery algorithms can be useful to understand and debug results. To explore the output of motif discovery algorithms, we propose the use of an adapted Self-Organizing Map, the DTW-SOM, on the list of motif's centers. In short, DTW-SOM is a vanilla Self-Organizing Map with three main differences, namely (1) the use the Dynamic Time Warping distance instead of the Euclidean distance, (2) the adoption of two new network initialization routines (a random sample initialization and an anchor initialization) and (3) the adjustment of the Adaptation phase of the training to work with variable-length time-series sequences. We test DTW-SOM in a synthetic motif dataset and two real time-series datasets from the UCR Time Series Classification Archive. After an exploration of results, we conclude that DTW-SOM is capable of extracting relevant information from a set of motifs and display it in a visualization that is space-efficient.
Finding manoeuvre motifs in vehicle telematics
Feb 10, 2020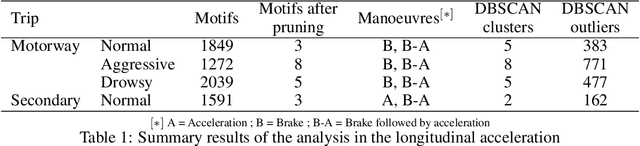
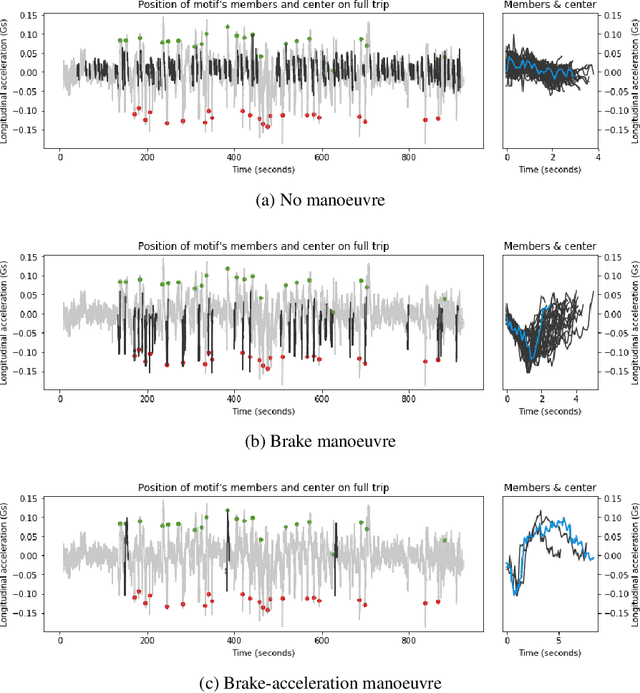
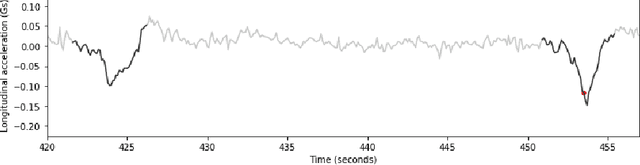
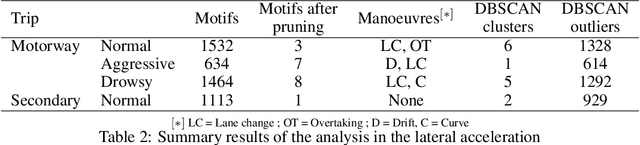
Driving behaviour has a great impact on road safety. A popular way of analysing driving behaviour is to move the focus to the manoeuvres as they give useful information about the driver who is performing them. In this paper, we investigate a new way of identifying manoeuvres from vehicle telematics data, through motif detection in time-series. We implement a modified version of the Extended Motif Discovery (EMD) algorithm, a classical variable-length motif detection algorithm for time-series and we applied it to the UAH-DriveSet, a publicly available naturalistic driving dataset. After a systematic exploration of the extracted motifs, we were able to conclude that the EMD algorithm was not only capable of extracting simple manoeuvres such as accelerations, brakes and curves, but also more complex manoeuvres, such as lane changes and overtaking manoeuvres, which validates motif discovery as a worthwhile line for future research.