 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFailure-tolerant Distributed Learning for Anomaly Detection in Wireless Networks
Mar 23, 2023



The analysis of distributed techniques is often focused upon their efficiency, without considering their robustness (or lack thereof). Such a consideration is particularly important when devices or central servers can fail, which can potentially cripple distributed systems. When such failures arise in wireless communications networks, important services that they use/provide (like anomaly detection) can be left inoperable and can result in a cascade of security problems. In this paper, we present a novel method to address these risks by combining both flat- and star-topologies, combining the performance and reliability benefits of both. We refer to this method as "Tol-FL", due to its increased failure-tolerance as compared to the technique of Federated Learning. Our approach both limits device failure risks while outperforming prior methods by up to 8% in terms of anomaly detection AUROC in a range of realistic settings that consider client as well as server failure, all while reducing communication costs. This performance demonstrates that Tol-FL is a highly suitable method for distributed model training for anomaly detection, especially in the domain of wireless networks.
Designing Neural Networks for Real-Time Systems
Aug 26, 2020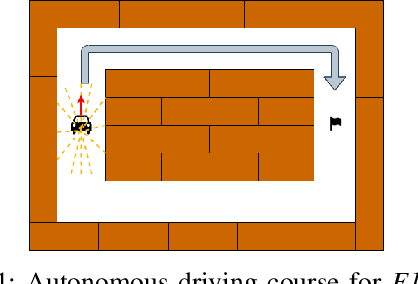
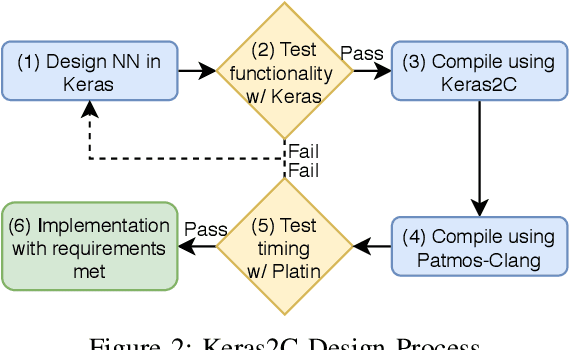
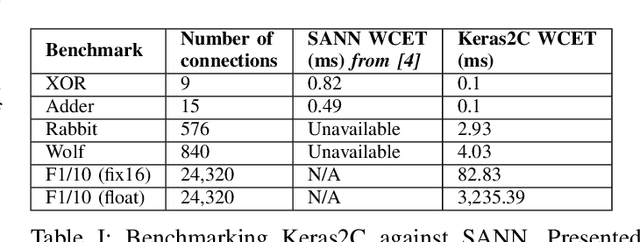
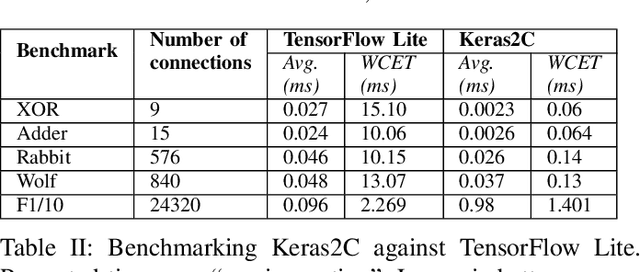
Artificial Neural Networks (ANNs) are increasingly being used within safety-critical Cyber-Physical Systems (CPSs). They are often co-located with traditional embedded software, and may perform advisory or control-based roles. It is important to validate both the timing and functional correctness of these systems. However, most approaches in the literature consider guaranteeing only the functionality of ANN based controllers. This issue stems largely from the implementation strategies used within common neural network frameworks -- their underlying source code is often simply unsuitable for formal techniques such as static timing analysis. As a result, developers of safety-critical CPS must rely on informal techniques such as measurement based approaches to prove correctness, techniques that provide weak guarantees at best. In this work we address this challenge. We propose a design pipeline whereby neural networks trained using the popular deep learning framework Keras are compiled to functionally equivalent C code. This C code is restricted to simple constructs that may be analysed by existing static timing analysis tools. As a result, if compiled to a suitable time-predictable platform all execution bounds may be statically derived. To demonstrate the benefits of our approach we execute an ANN trained to drive an autonomous vehicle around a race track. We compile the ANN to the Patmos time-predictable controller, and show that we can derive worst case execution timings.