 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRuntime Interchange for Adaptive Re-use of Intelligent Cyber-Physical System Controllers
Sep 24, 2021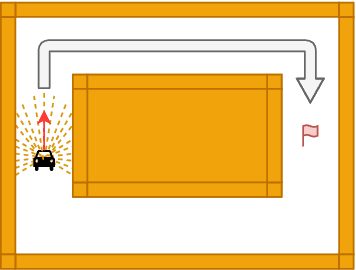
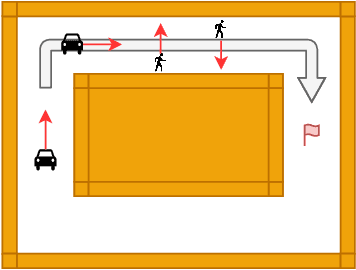
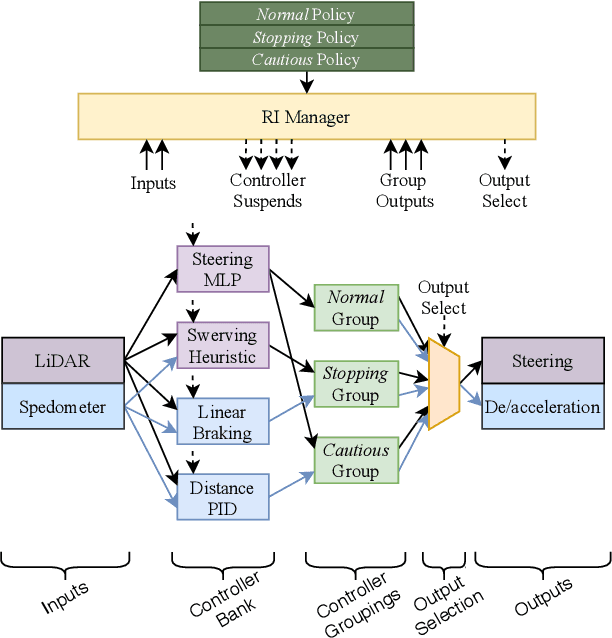
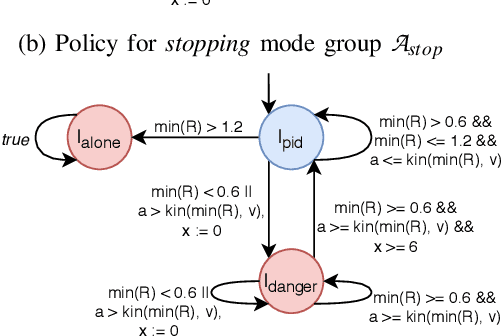
Cyber-Physical Systems (CPSs) such as those found within autonomous vehicles are increasingly adopting Artificial Neural Network (ANN)-based controllers. To ensure the safety of these controllers, there is a spate of recent activity to formally verify the ANN-based designs. There are two challenges with these approaches: (1) The verification of such systems is difficult and time consuming. (2) These verified controllers are not able to adapt to frequent requirements changes, which are typical in situations like autonomous driving. This raises the question: how can trained and verified controllers, which have gone through expensive training and verification processes, be re-used to deal with requirement changes? This paper addresses this challenge for the first time by proposing a new framework that is capable of dealing with requirement changes at runtime through a mechanism we term runtime interchange. Our approach functions via a continual exchange and selection process of multiple pre-verified controllers. It represents a key step on the way to component-oriented engineering for intelligent designs, as it preserves the behaviours of the original controllers while introducing additional functionality. To demonstrate the efficacy of our approach we utilise an existing autonomous driving case study as well as a set of smaller benchmarks. These show that introduced overheads are extremely minimal and that the approach is very scalable.
Designing Neural Networks for Real-Time Systems
Aug 26, 2020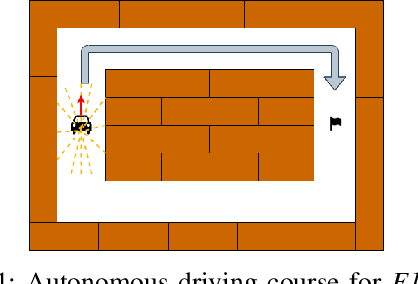
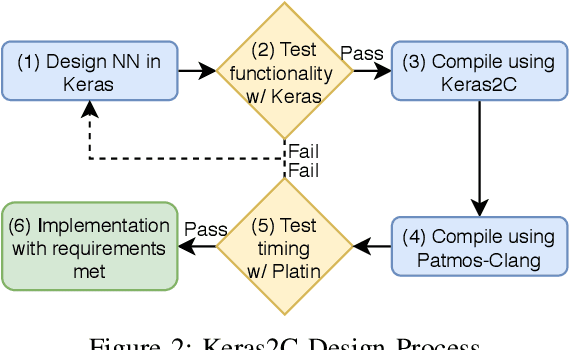
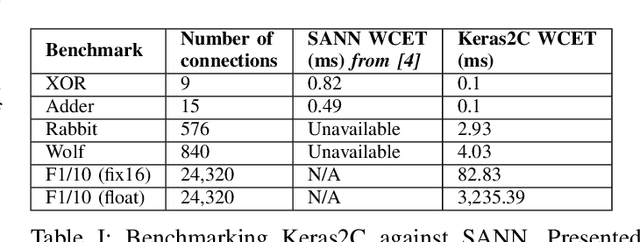
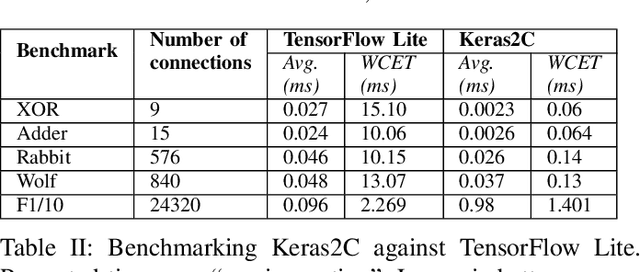
Artificial Neural Networks (ANNs) are increasingly being used within safety-critical Cyber-Physical Systems (CPSs). They are often co-located with traditional embedded software, and may perform advisory or control-based roles. It is important to validate both the timing and functional correctness of these systems. However, most approaches in the literature consider guaranteeing only the functionality of ANN based controllers. This issue stems largely from the implementation strategies used within common neural network frameworks -- their underlying source code is often simply unsuitable for formal techniques such as static timing analysis. As a result, developers of safety-critical CPS must rely on informal techniques such as measurement based approaches to prove correctness, techniques that provide weak guarantees at best. In this work we address this challenge. We propose a design pipeline whereby neural networks trained using the popular deep learning framework Keras are compiled to functionally equivalent C code. This C code is restricted to simple constructs that may be analysed by existing static timing analysis tools. As a result, if compiled to a suitable time-predictable platform all execution bounds may be statically derived. To demonstrate the benefits of our approach we execute an ANN trained to drive an autonomous vehicle around a race track. We compile the ANN to the Patmos time-predictable controller, and show that we can derive worst case execution timings.