 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-World Implementation of Reinforcement Learning Based Energy Coordination for a Cluster of Households
Oct 29, 2023


Given its substantial contribution of 40\% to global power consumption, the built environment has received increasing attention to serve as a source of flexibility to assist the modern power grid. In that respect, previous research mainly focused on energy management of individual buildings. In contrast, in this paper, we focus on aggregated control of a set of residential buildings, to provide grid supporting services, that eventually should include ancillary services. In particular, we present a real-life pilot study that studies the effectiveness of reinforcement-learning (RL) in coordinating the power consumption of 8 residential buildings to jointly track a target power signal. Our RL approach relies solely on observed data from individual households and does not require any explicit building models or simulators, making it practical to implement and easy to scale. We show the feasibility of our proposed RL-based coordination strategy in a real-world setting. In a 4-week case study, we demonstrate a hierarchical control system, relying on an RL-based ranking system to select which households to activate flex assets from, and a real-time PI control-based power dispatch mechanism to control the selected assets. Our results demonstrate satisfactory power tracking, and the effectiveness of the RL-based ranks which are learnt in a purely data-driven manner.
Computationally efficient joint coordination of multiple electric vehicle charging points using reinforcement learning
Mar 26, 2022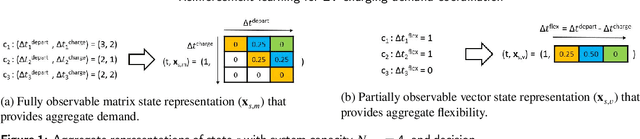
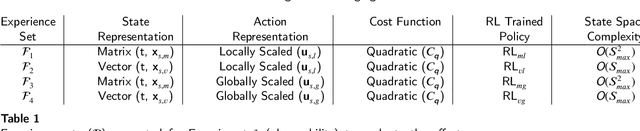


A major challenge in todays power grid is to manage the increasing load from electric vehicle (EV) charging. Demand response (DR) solutions aim to exploit flexibility therein, i.e., the ability to shift EV charging in time and thus avoid excessive peaks or achieve better balancing. Whereas the majority of existing research works either focus on control strategies for a single EV charger, or use a multi-step approach (e.g., a first high level aggregate control decision step, followed by individual EV control decisions), we rather propose a single-step solution that jointly coordinates multiple charging points at once. In this paper, we further refine an initial proposal using reinforcement learning (RL), specifically addressing computational challenges that would limit its deployment in practice. More precisely, we design a new Markov decision process (MDP) formulation of the EV charging coordination process, exhibiting only linear space and time complexity (as opposed to the earlier quadratic space complexity). We thus improve upon earlier state-of-the-art, demonstrating 30% reduction of training time in our case study using real-world EV charging session data. Yet, we do not sacrifice the resulting performance in meeting the DR objectives: our new RL solutions still improve the performance of charging demand coordination by 40-50% compared to a business-as-usual policy (that charges EV fully upon arrival) and 20-30% compared to a heuristic policy (that uniformly spreads individual EV charging over time).
Optimized cost function for demand response coordination of multiple EV charging stations using reinforcement learning
Mar 03, 2022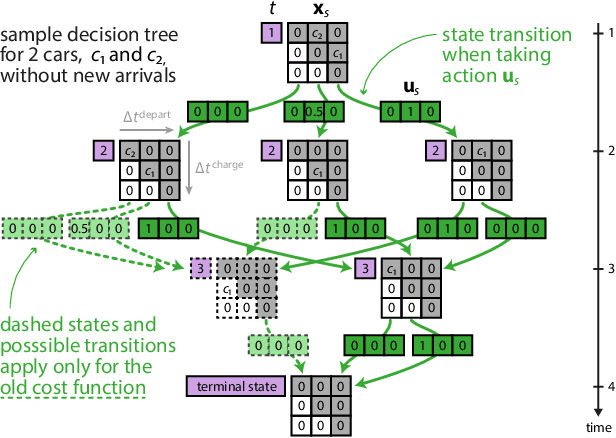
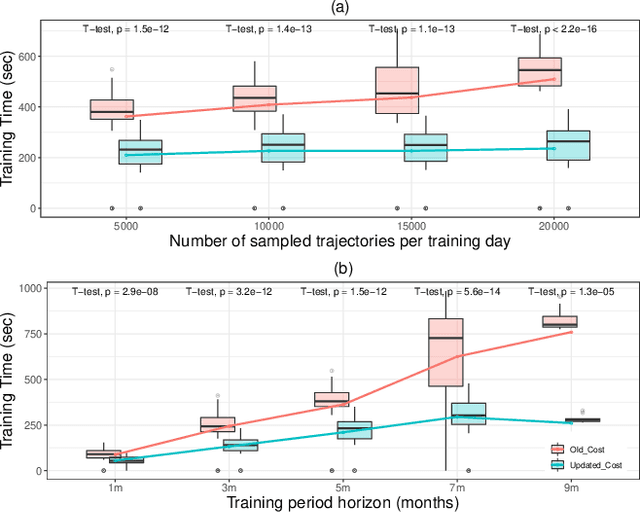
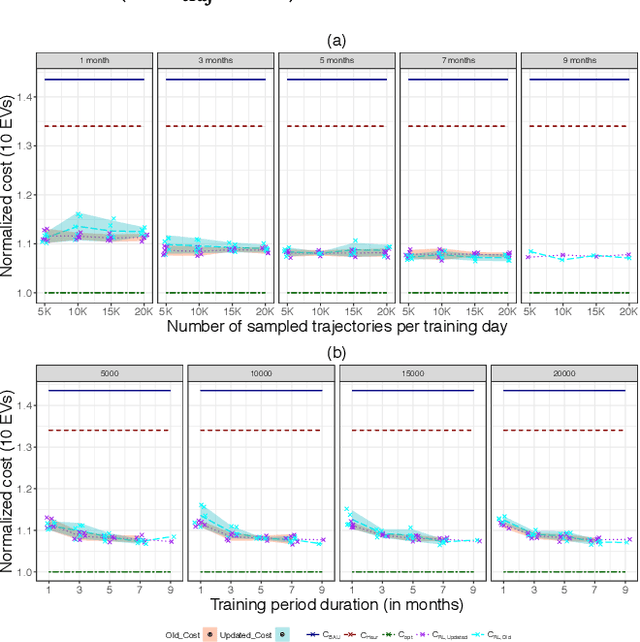
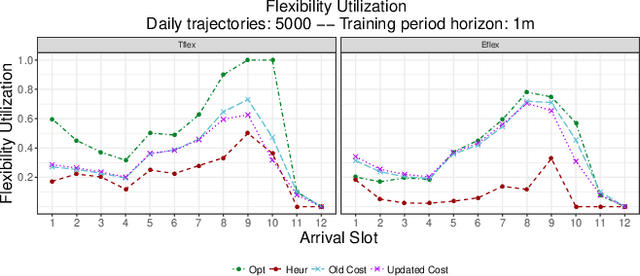
Electric vehicle (EV) charging stations represent a substantial load with significant flexibility. The exploitation of that flexibility in demand response (DR) algorithms becomes increasingly important to manage and balance demand and supply in power grids. Model-free DR based on reinforcement learning (RL) is an attractive approach to balance such EV charging load. We build on previous research on RL, based on a Markov decision process (MDP) to simultaneously coordinate multiple charging stations. However, we note that the computationally expensive cost function adopted in the previous research leads to large training times, which limits the feasibility and practicality of the approach. We, therefore, propose an improved cost function that essentially forces the learned control policy to always fulfill any charging demand that does not offer any flexibility. We rigorously compare the newly proposed batch RL fitted Q-iteration implementation with the original (costly) one, using real-world data. Specifically, for the case of load flattening, we compare the two approaches in terms of (i) the processing time to learn the RL-based charging policy, as well as (ii) the overall performance of the policy decisions in terms of meeting the target load for unseen test data. The performance is analyzed for different training periods and varying training sample sizes. In addition to both RL policies performance results, we provide performance bounds in terms of both (i) an optimal all-knowing strategy, and (ii) a simple heuristic spreading individual EV charging uniformly over time
Defining a synthetic data generator for realistic electric vehicle charging sessions
Feb 28, 2022
Electric vehicle (EV) charging stations have become prominent in electricity grids in the past years. Analysis of EV charging sessions is useful for flexibility analysis, load balancing, offering incentives to customers, etc. Yet, the limited availability of such EV sessions data hinders further development in these fields. Addressing this need for publicly available and realistic data, we develop a synthetic data generator (SDG) for EV charging sessions. Our SDG assumes the EV inter-arrival time to follow an exponential distribution. Departure times are modeled by defining a conditional probability density function (pdf) for connection times. This pdf for connection time and required energy is fitted by Gaussian mixture models. Since we train our SDG using a large real-world dataset, its output is realistic.
Learning physics-informed simulation models for soft robotic manipulation: A case study with dielectric elastomer actuators
Feb 25, 2022
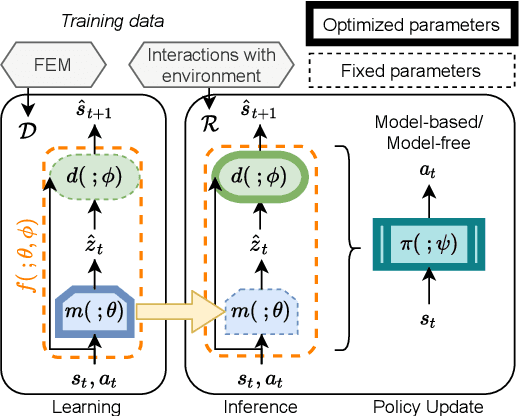
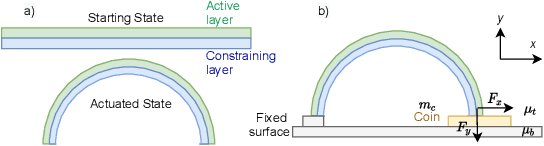

Soft actuators offer a safe and adaptable approach to robotic tasks like gentle grasping and dexterous movement. Creating accurate models to control such systems, however, is challenging due to the complex physics of deformable materials. Accurate Finite Element Method (FEM) models incur prohibitive computational complexity for closed-loop use. Using a differentiable simulator is an attractive alternative, but their applicability to soft actuators and deformable materials remains under-explored. This paper presents a framework that combines the advantages of both. We learn a differentiable model consisting of a material properties neural network and an analytical dynamics model of the remainder of the manipulation task. This physics-informed model is trained using data generated from FEM and can be used for closed-loop control and inference. We evaluate our framework on a dielectric elastomer actuator (DEA) coin-pulling task. We simulate DEA coin pulling in FEM, and design experiments to evaluate the physics-informed model for simulation, control, and inference. Our model attains < 5% simulation error compared to FEM, and we use it as the basis for an MPC controller that outperforms (i.e., requires fewer iterations to converge) a model-free actor-critic policy, a heuristic policy, and a PD controller.