 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGreenMO: Virtualized User-proportionate MIMO
Nov 29, 2022



With the turn of new decade, wireless communications face a major challenge on connecting many more new users and devices, at the same time being energy efficient and minimizing its carbon footprint. However, the current approaches to address the growing number of users and spectrum demands, like traditional fully digital architectures for Massive MIMO, demand exorbitant energy consumption. The reason is that traditionally MIMO requires a separate RF chain per antenna, so the power consumption scales with number of antennas, instead of number of users, hence becomes energy inefficient. Instead, GreenMO creates a new massive MIMO architecture which is able to use many more antennas while keeping power consumption to user-proportionate numbers. To achieve this GreenMO introduces for the first time, the concept of virtualization of the RF chain hardware. Instead of laying the RF chains physically to each antenna, GreenMO creates these RF chains virtually in digital domain. This also enables GreenMO to be the first flexible massive MIMO architecture. Since GreenMO's virtual RF chains are created on the fly digitally, it can tune the number of these virtual chains according to the user load, hence always flexibly consume user-proportionate power. Thus, GreenMO paves the way for green and flexible massive MIMO. We prototype GreenMO on a PCB with eight antennas and evaluate it with a WARPv3 SDR platform in an office environment. The results demonstrate that GreenMO is 3x more power-efficient than traditional Massive MIMO and 4x more spectrum-efficient than traditional OFDMA systems, while multiplexing 4 users, and can save upto 40% power in modern 5G NR base stations.
R-fiducial: Reliable and Scalable Radar Fiducials for Smart mmwave Sensing
Sep 27, 2022
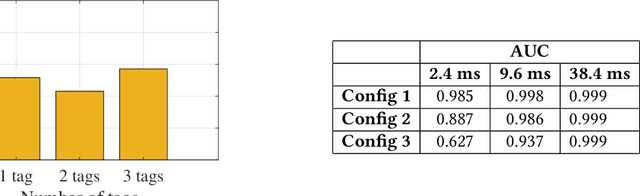

Millimeter wave sensing has recently attracted a lot of attention given its environmental robust nature. In situations where visual sensors like cameras fail to perform, mmwave radars can be used to achieve reliable performance. However, because of the poor scattering performance and lack of texture in millimeter waves, radars can not be used in several situations that require precise identification of objects. In this paper, we take insight from camera fiducials which are very easily identifiable by the camera, and present R-fiducial tags, which smartly augment the current infrastructure to enable a myriad of applications with mmwave radars. R-fiducial acts as a fiducial for mmwave sensing, similar to camera fiducials, and can be reliably identified by a mmwave radar. We identify a precise list of requirements that a millimeter wave fiducial has to follow and show how R-fiducial achieves all of them. R-fiducial uses a novel spread-spectrum modulation technique that provides low latency with high reliability. Our evaluations show that R-fiducial can be reliably detected upto 25m and upto 120 degrees field of view with a latency of the order of milliseconds. We also conduct experiments and case studies in adverse and low visibility conditions to showcase the applicability of R-fiducial in a wide range of applications.
BeamScatter: Scalable, Deployable Long-Range backscatter communication with Beam-Steering
Oct 27, 2021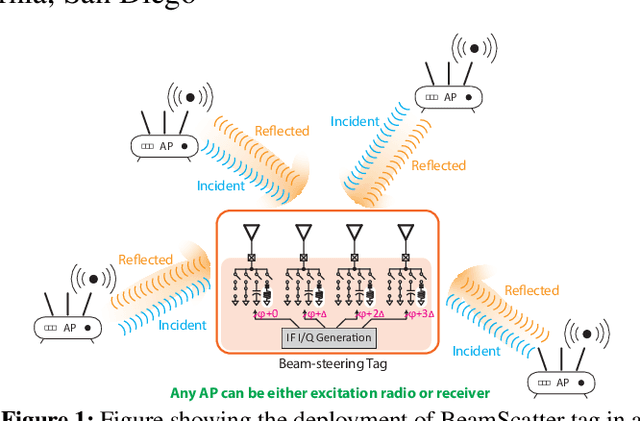
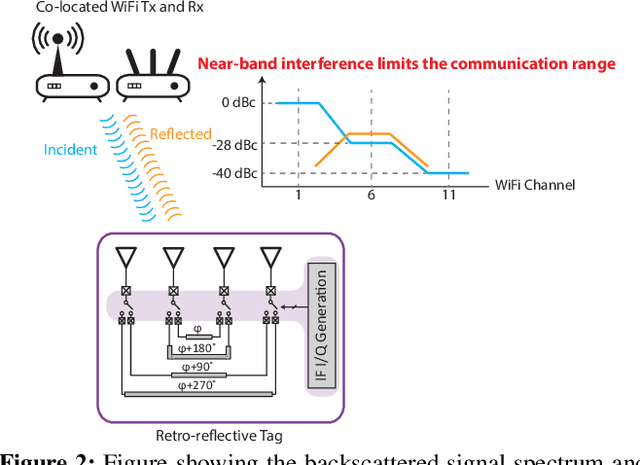
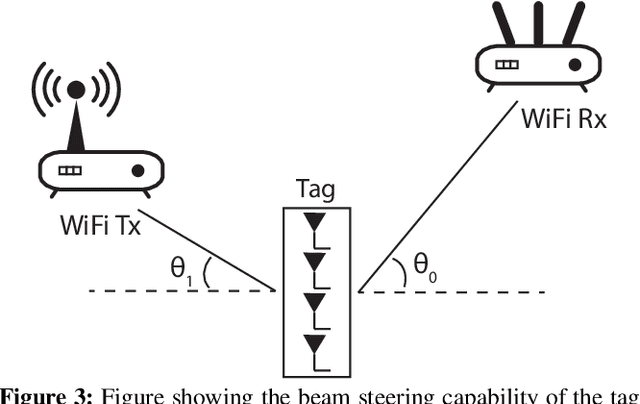
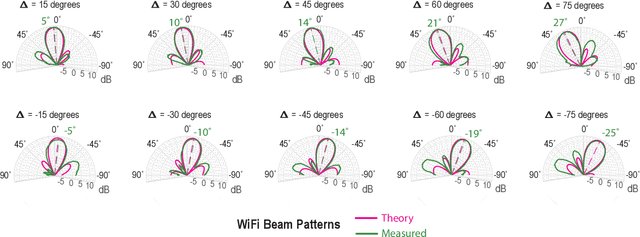
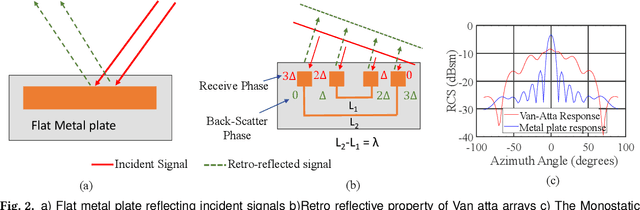
WiFi backscatter tags can enable direct connectivity of IoT devices with commodity WiFi hardware at low power. However, most state-of-the-art backscatter tag implementations in this area have a limited transmitter to tag range and are not suitable to be deployed in a WiFi mesh network nor take full advantage of today's WiFi networks. In this paper, we present BeamScatter, which can realize a backscatter tag-based onMIMO techniques that can work at a very long separation of 28m from an access point and enables their deployment in WiFi mesh networks. BeamScatter presents a novel technique to perform beam-steering on the MIMO tag at a very low power consumption of 88uW and achieve a peak throughput of 1Mbps. Next BeamScatter creates a novel modeling framework to decide the optimal phase setting on the tag to steer the backscattered signal towards a specific direction of interest.
Wi-Chlorian: Wireless sensing and localization of contact forces on a space continuum
Dec 31, 2020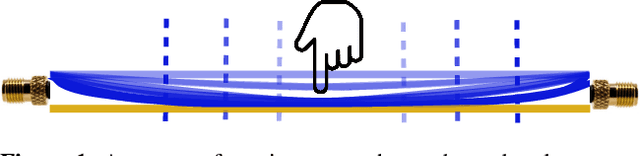
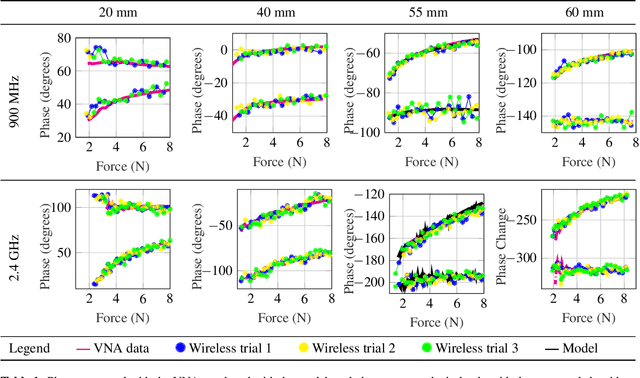
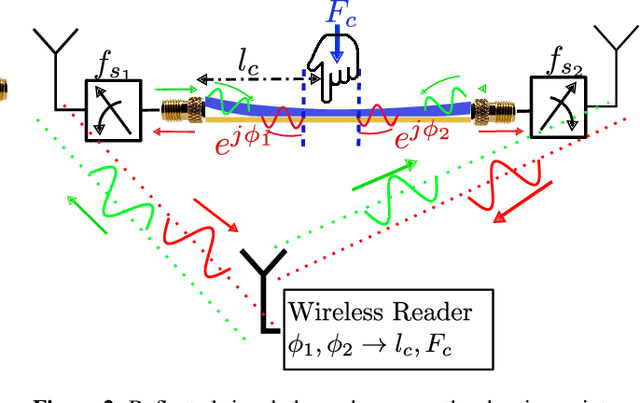
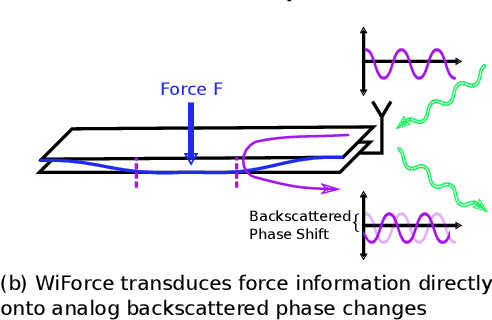
Contact force is a natural way for humans to interact with the physical world around us. However, most of our interactions with the digital world are largely based on a simple binary sense of touch (contact or no contact). Similarly, when interacting with robots to perform complex tasks, such as surgery, we need to acquire the rich force information and contact location, to aid in the task. To address these issues, we present the design and fabrication of Wi-Chlorian, which is a 'wireless' sensors that can be attached to an object or robot, like a sticker. Wi-Chlorian's sensor transduces force magnitude and location into phase changes of an incident RF signal, which is reflected back to enable measurement of force and contact location. Wi-Chlorian's sensor is designed to support wide-band frequencies all the way up to 3GHz.We evaluate the force sensing wirelessly in different environments, including in-body like, and achieve force ac-curacy of 0.3N and contact location accuracy of 0.6mm.