 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImage-based Pose Estimation and Shape Reconstruction for Robot Manipulators and Soft, Continuum Robots via Differentiable Rendering
Feb 27, 2023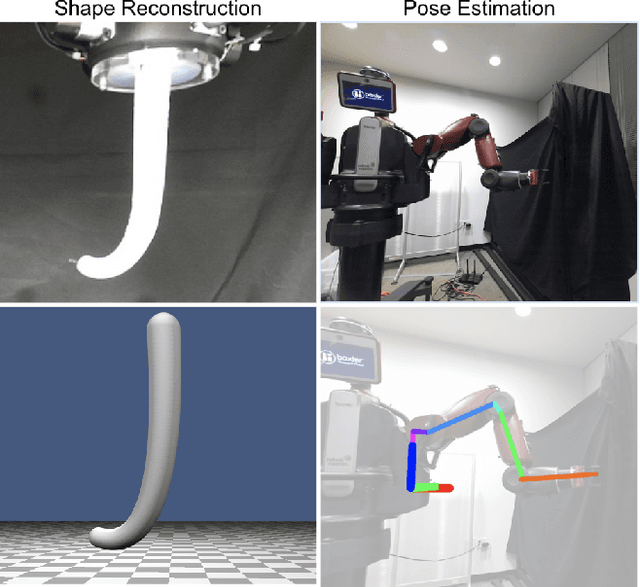

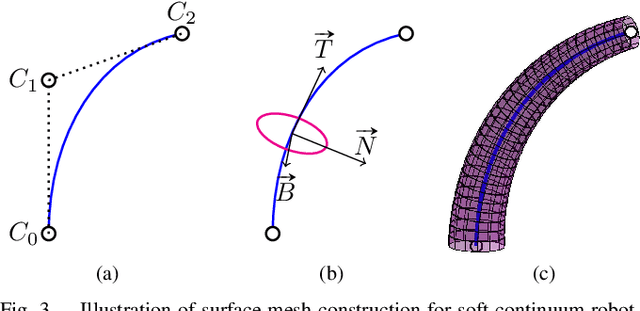

State estimation from measured data is crucial for robotic applications as autonomous systems rely on sensors to capture the motion and localize in the 3D world. Among sensors that are designed for measuring a robot's pose, or for soft robots, their shape, vision sensors are favorable because they are information-rich, easy to set up, and cost-effective. With recent advancements in computer vision, deep learning-based methods no longer require markers for identifying feature points on the robot. However, learning-based methods are data-hungry and hence not suitable for soft and prototyping robots, as building such bench-marking datasets is usually infeasible. In this work, we achieve image-based robot pose estimation and shape reconstruction from camera images. Our method requires no precise robot meshes, but rather utilizes a differentiable renderer and primitive shapes. It hence can be applied to robots for which CAD models might not be available or are crude. Our parameter estimation pipeline is fully differentiable. The robot shape and pose are estimated iteratively by back-propagating the image loss to update the parameters. We demonstrate that our method of using geometrical shape primitives can achieve high accuracy in shape reconstruction for a soft continuum robot and pose estimation for a robot manipulator.
WiForceSticker: Batteryless, Thin Sticker-like Flexible Force Sensor
Sep 19, 2022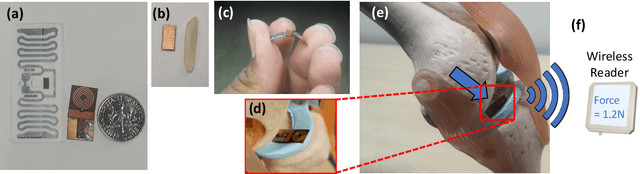
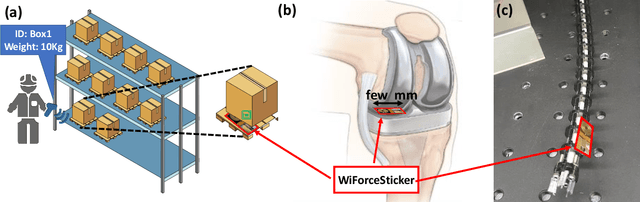
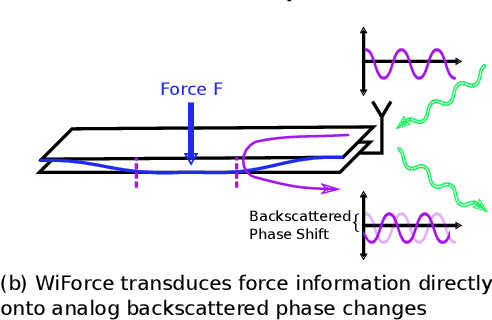
Any two objects in contact with each other exert a force that could be simply due to gravity or mechanical contact, such as a robotic arm gripping an object or even the contact between two bones at our knee joints. The ability to naturally measure and monitor these contact forces allows a plethora of applications from warehouse management (detect faulty packages based on weights) to robotics (making a robotic arms' grip as sensitive as human skin) and healthcare (knee-implants). It is challenging to design a ubiquitous force sensor that can be used naturally for all these applications. First, the sensor should be small enough to fit in narrow spaces. Next, we don't want to lay cumbersome cables to read the force values from the sensors. Finally, we need to have a battery-free design to meet the in-vivo applications. We develop WiForceSticker, a wireless, battery-free, sticker-like force sensor that can be ubiquitously deployed on any surface, such as all warehouse packages, robotic arms, and knee joints. WiForceSticker first designs a tiny $4$~mm~$\times$~$2$~mm~$\times$~$0.4$~mm capacitative sensor design equipped with a $10$~mm~$\times$~$10$~mm antenna designed on a flexible PCB substrate. Secondly, it introduces a new mechanism to transduce the force information on ambient RF radiations that can be read by a remotely located reader wirelessly without requiring any battery or active components at the force sensor, by interfacing the sensors with COTS RFID systems. The sensor can detect forces in the range of $0$-$6$~N with sensing accuracy of $<0.5$~N across multiple testing environments and evaluated with over $10,000$ varying force level presses on the sensor. We also showcase two application case studies with our designed sensors, weighing warehouse packages and sensing forces applied by bone joints.
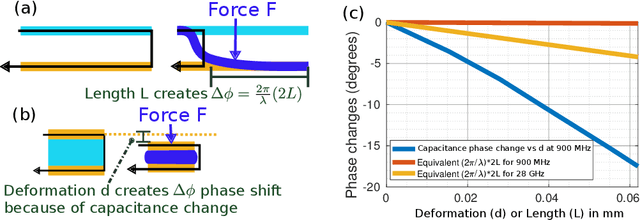
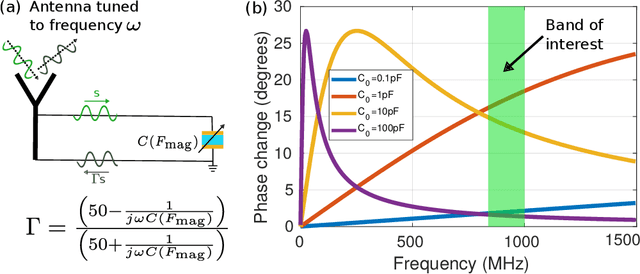
Wi-Chlorian: Wireless sensing and localization of contact forces on a space continuum
Dec 31, 2020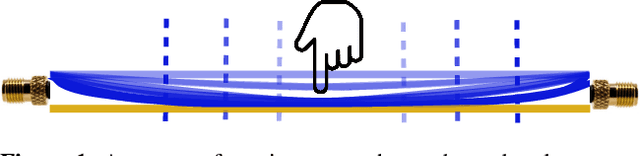
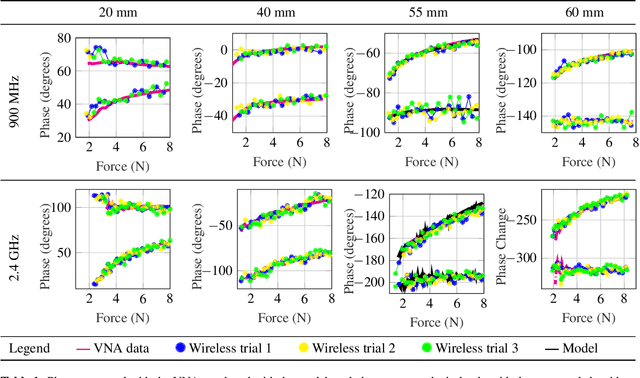
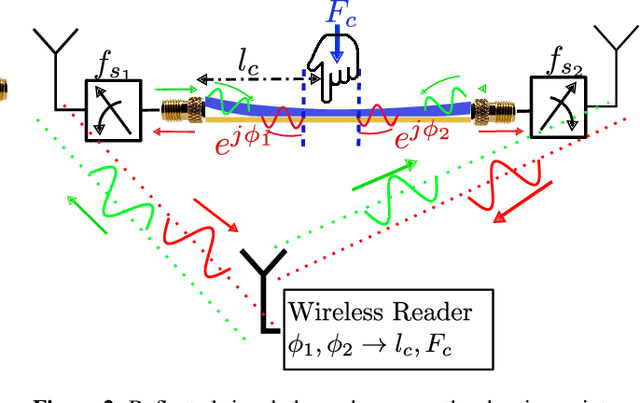
Contact force is a natural way for humans to interact with the physical world around us. However, most of our interactions with the digital world are largely based on a simple binary sense of touch (contact or no contact). Similarly, when interacting with robots to perform complex tasks, such as surgery, we need to acquire the rich force information and contact location, to aid in the task. To address these issues, we present the design and fabrication of Wi-Chlorian, which is a 'wireless' sensors that can be attached to an object or robot, like a sticker. Wi-Chlorian's sensor transduces force magnitude and location into phase changes of an incident RF signal, which is reflected back to enable measurement of force and contact location. Wi-Chlorian's sensor is designed to support wide-band frequencies all the way up to 3GHz.We evaluate the force sensing wirelessly in different environments, including in-body like, and achieve force ac-curacy of 0.3N and contact location accuracy of 0.6mm.