 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWi-Chlorian: Wireless sensing and localization of contact forces on a space continuum
Paper and Code
Dec 31, 2020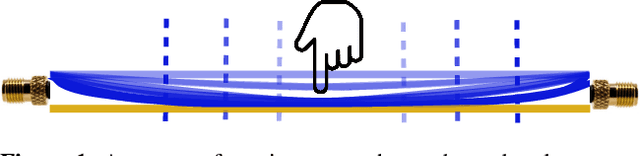
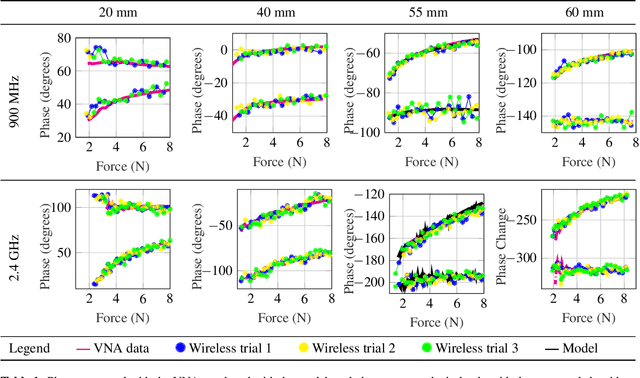
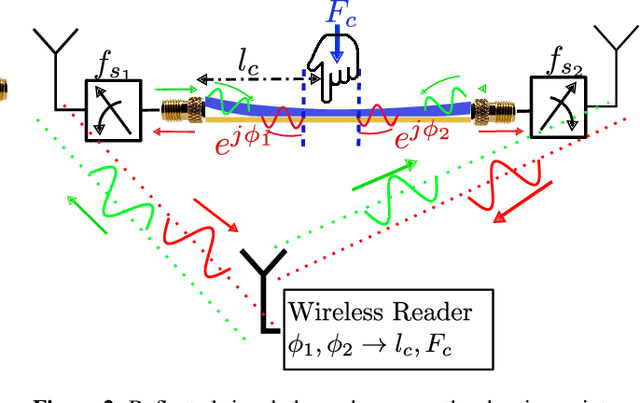
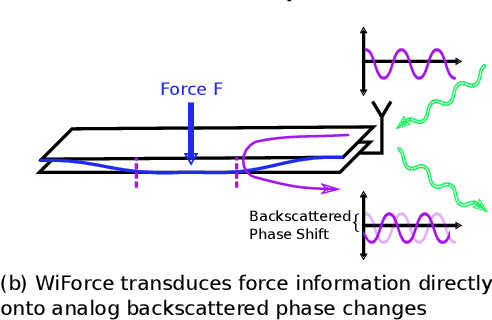
Contact force is a natural way for humans to interact with the physical world around us. However, most of our interactions with the digital world are largely based on a simple binary sense of touch (contact or no contact). Similarly, when interacting with robots to perform complex tasks, such as surgery, we need to acquire the rich force information and contact location, to aid in the task. To address these issues, we present the design and fabrication of Wi-Chlorian, which is a 'wireless' sensors that can be attached to an object or robot, like a sticker. Wi-Chlorian's sensor transduces force magnitude and location into phase changes of an incident RF signal, which is reflected back to enable measurement of force and contact location. Wi-Chlorian's sensor is designed to support wide-band frequencies all the way up to 3GHz.We evaluate the force sensing wirelessly in different environments, including in-body like, and achieve force ac-curacy of 0.3N and contact location accuracy of 0.6mm.