 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePredicting Future Spatiotemporal Occupancy Grids with Semantics for Autonomous Driving
Oct 03, 2023

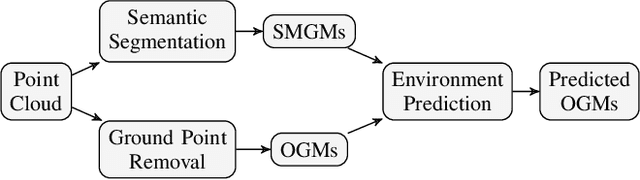

For autonomous vehicles to proactively plan safe trajectories and make informed decisions, they must be able to predict the future occupancy states of the local environment. However, common issues with occupancy prediction include predictions where moving objects vanish or become blurred, particularly at longer time horizons. We propose an environment prediction framework that incorporates environment semantics for future occupancy prediction. Our method first semantically segments the environment and uses this information along with the occupancy information to predict the spatiotemporal evolution of the environment. We validate our approach on the real-world Waymo Open Dataset. Compared to baseline methods, our model has higher prediction accuracy and is capable of maintaining moving object appearances in the predictions for longer prediction time horizons.
Dynamics-Aware Spatiotemporal Occupancy Prediction in Urban Environments
Sep 27, 2022

Detection and segmentation of moving obstacles, along with prediction of the future occupancy states of the local environment, are essential for autonomous vehicles to proactively make safe and informed decisions. In this paper, we propose a framework that integrates the two capabilities together using deep neural network architectures. Our method first detects and segments moving objects in the scene, and uses this information to predict the spatiotemporal evolution of the environment around autonomous vehicles. To address the problem of direct integration of both static-dynamic object segmentation and environment prediction models, we propose using occupancy-based environment representations across the whole framework. Our method is validated on the real-world Waymo Open Dataset and demonstrates higher prediction accuracy than baseline methods.
Double-Prong ConvLSTM for Spatiotemporal Occupancy Prediction in Dynamic Environments
Nov 18, 2020
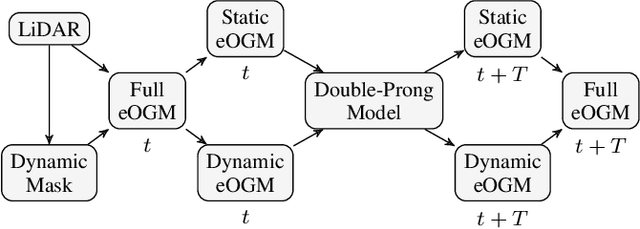
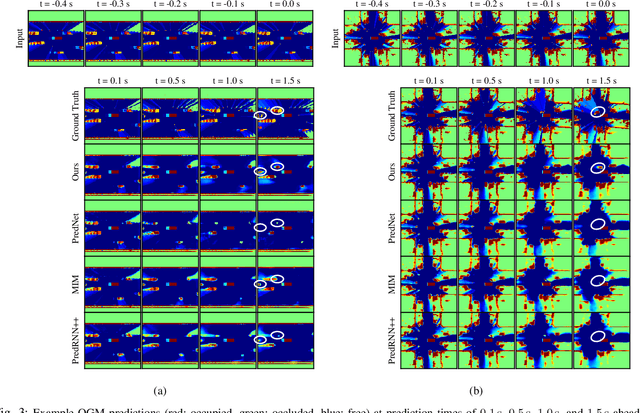

Predicting the future occupancy state of an environment is important to enable informed decisions for autonomous vehicles. Common challenges in occupancy prediction include vanishing dynamic objects and blurred predictions, especially for long prediction horizons. In this work, we propose a double-prong neural network architecture to predict the spatiotemporal evolution of the environment occupancy state. One prong is dedicated to predicting how the static environment will be observed by the moving ego vehicle. The other prong predicts how the dynamic objects in the environment will move. Experiments conducted on the real-world Waymo Open Dataset indicate that the fused output of the two prongs is capable of retaining dynamic objects and reducing blurriness in the predictions for longer time horizons than baseline models.
Directional Primitives for Uncertainty-Aware Motion Estimation in Urban Environments
Jul 01, 2020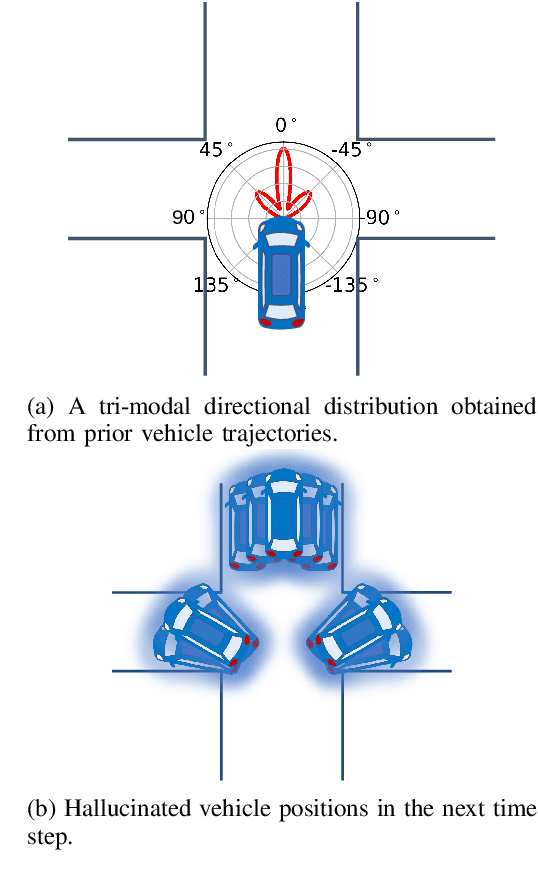
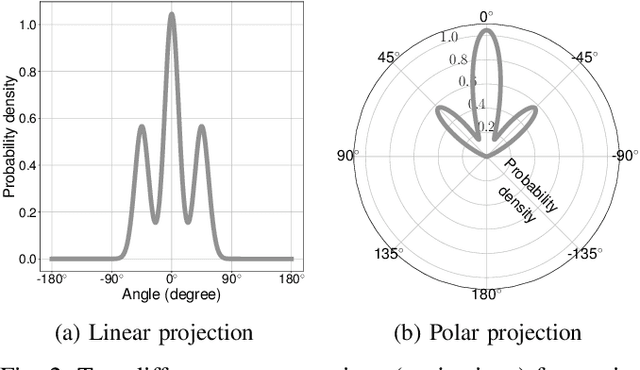
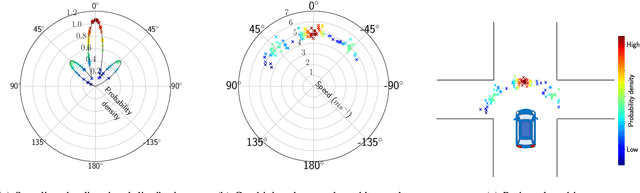
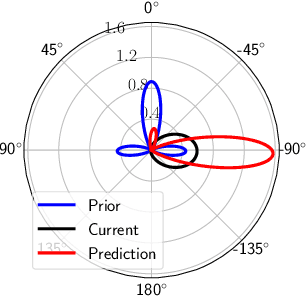
We can use driving data collected over a long period of time to extract rich information about how vehicles behave in different areas of the roads. In this paper, we introduce the concept of directional primitives, which is a representation of prior information of road networks. Specifically, we represent the uncertainty of directions using a mixture of von Mises distributions and associated speeds using gamma distributions. These location-dependent primitives can be combined with motion information of surrounding vehicles to predict their future behavior in the form of probability distributions. Experiments conducted on highways, intersections, and roundabouts in the Carla simulator, as well as real-world urban driving datasets, indicate that primitives lead to better uncertainty-aware motion estimation.