 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDouble-Prong ConvLSTM for Spatiotemporal Occupancy Prediction in Dynamic Environments
Paper and Code

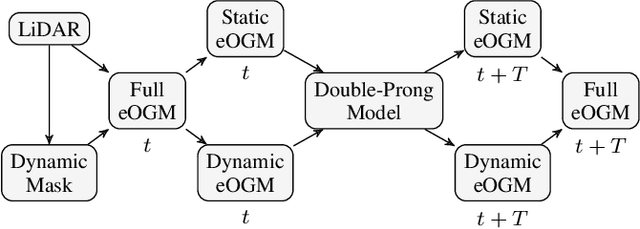
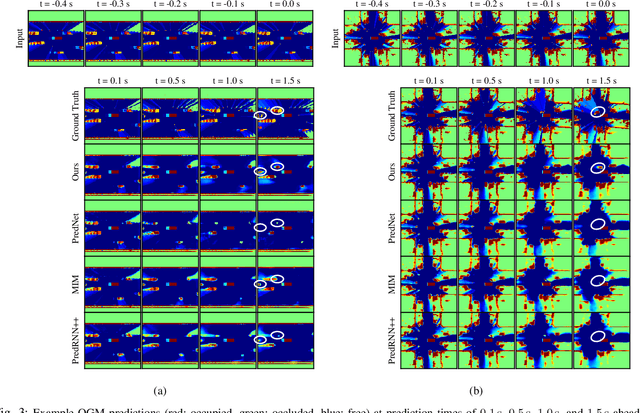

Predicting the future occupancy state of an environment is important to enable informed decisions for autonomous vehicles. Common challenges in occupancy prediction include vanishing dynamic objects and blurred predictions, especially for long prediction horizons. In this work, we propose a double-prong neural network architecture to predict the spatiotemporal evolution of the environment occupancy state. One prong is dedicated to predicting how the static environment will be observed by the moving ego vehicle. The other prong predicts how the dynamic objects in the environment will move. Experiments conducted on the real-world Waymo Open Dataset indicate that the fused output of the two prongs is capable of retaining dynamic objects and reducing blurriness in the predictions for longer time horizons than baseline models.