 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Circle Grid-based Approach for Obstacle Avoidance Motion Planning of Unmanned Surface Vehicles
Feb 09, 2022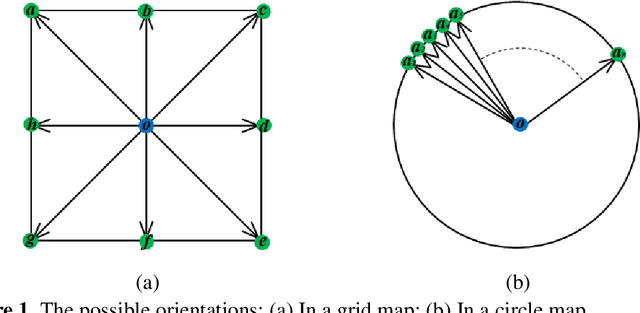
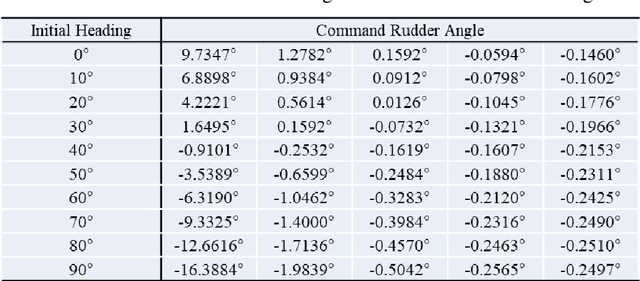
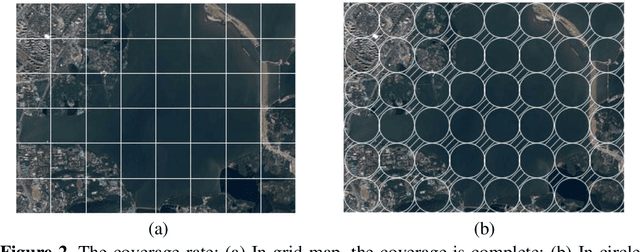
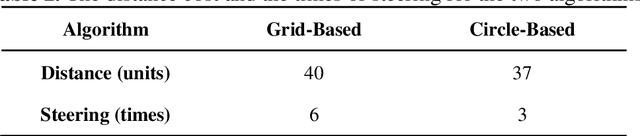
Aiming at an obstacle avoidance problem with dynamic constraints for Unmanned Surface Vehicle (USV), a method based on Circle Grid Trajectory Cell (CGTC) is proposed. Firstly, the ship model and standardization rules are constructed to develop and constrain the trajectory, respectively. Secondly, by analyzing the properties of the circle grid, the circle grid tree is produced to guide the motion of the USV. Then, the kinematics and dynamics of the USV are considered through the on-line trajectory generator by designing a relational function that links the rudder angle, heading angle, and the central angle of the circle grid. Finally, obstacle avoidance is achieved by leveraging the on-line trajectory generator to choose a safe, smooth, and efficient path for the USV. The experimental results indicate that the proposed method can avoid both static and dynamic obstacles, have better performance in terms of distance cost and steering cost comparing with the related methods, and our method only takes 50% steering cost of the grid-based method; the collision avoidance path not only conforms to the USV dynamic characteristic but also provides a reference of steering command.
The Review Unmanned Surface Vehicle Path Planning: Based on Multi-modality Constraint
Jul 03, 2020
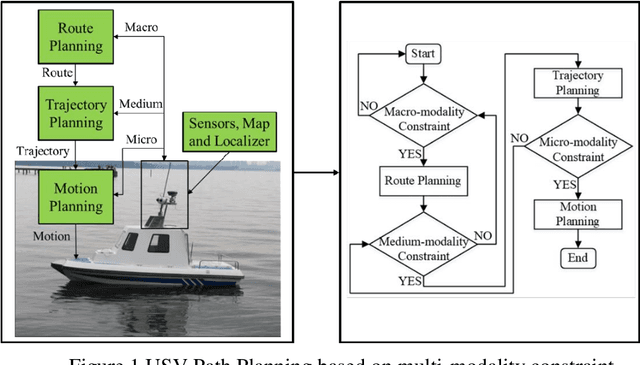

The essence of the path planning problems is multi-modality constraint. However, most of the current literature has not mentioned this issue. This paper introduces the research progress of path planning based on the multi-modality constraint. The path planning of multi-modality constraint research can be classified into three stages in terms of its basic ingredients (such as shape, kinematics and dynamics et al.): Route Planning, Trajectory Planning and Motion Planning. It then reviews the research methods and classical algorithms, especially those applied to the Unmanned Surface Vehicle (USV) in every stage. Finally, the paper points out some existing problems in every stage and suggestions for future research.
Randomness in Deconvolutional Networks for Visual Representation
Feb 20, 2018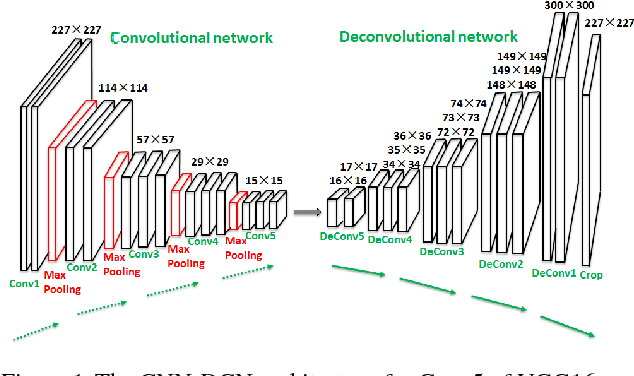
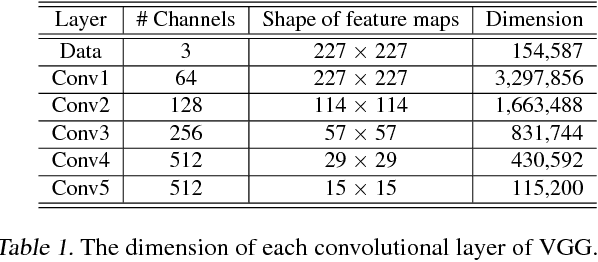
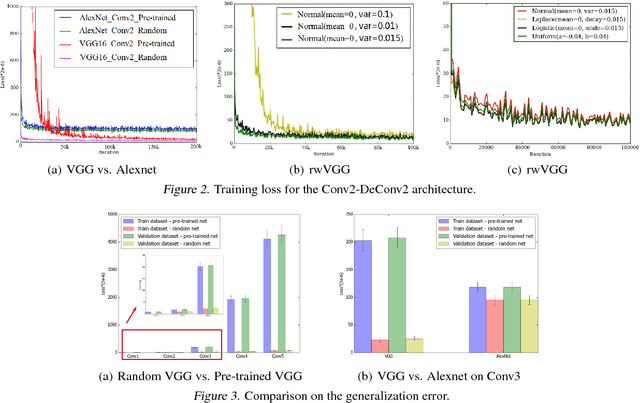
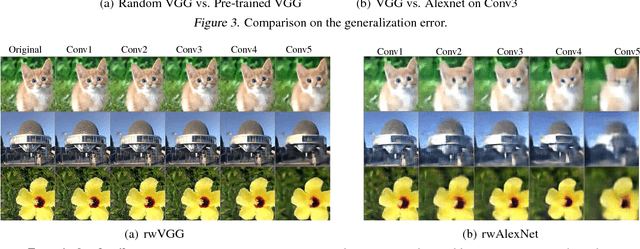
Toward a deeper understanding on the inner work of deep neural networks, we investigate CNN (convolutional neural network) using DCN (deconvolutional network) and randomization technique, and gain new insights for the intrinsic property of this network architecture. For the random representations of an untrained CNN, we train the corresponding DCN to reconstruct the input images. Compared with the image inversion on pre-trained CNN, our training converges faster and the yielding network exhibits higher quality for image reconstruction. It indicates there is rich information encoded in the random features; the pre-trained CNN may discard information irrelevant for classification and encode relevant features in a way favorable for classification but harder for reconstruction. We further explore the property of the overall random CNN-DCN architecture. Surprisingly, images can be inverted with satisfactory quality. Extensive empirical evidence as well as theoretical analysis are provided.