 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Circle Grid-based Approach for Obstacle Avoidance Motion Planning of Unmanned Surface Vehicles
Feb 09, 2022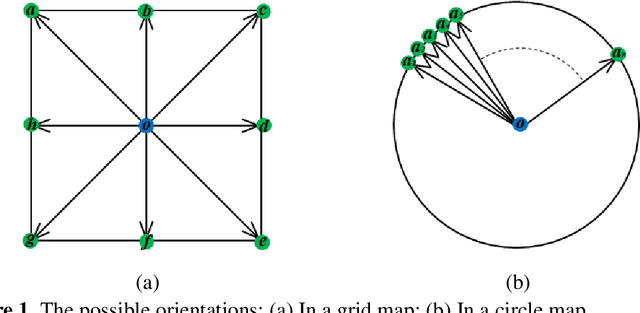
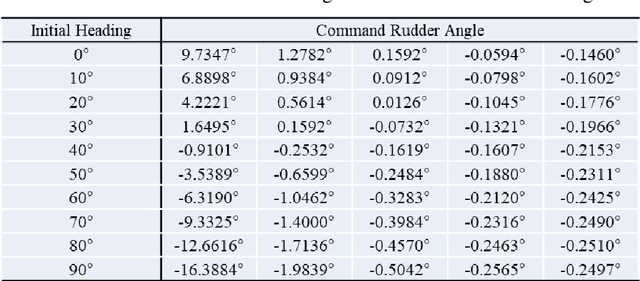
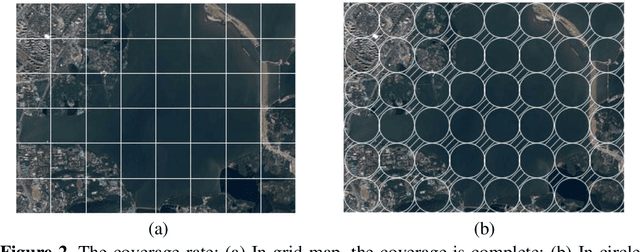
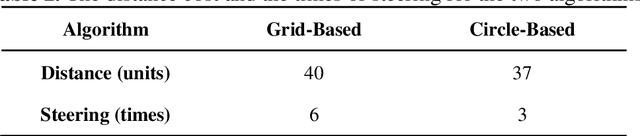
Aiming at an obstacle avoidance problem with dynamic constraints for Unmanned Surface Vehicle (USV), a method based on Circle Grid Trajectory Cell (CGTC) is proposed. Firstly, the ship model and standardization rules are constructed to develop and constrain the trajectory, respectively. Secondly, by analyzing the properties of the circle grid, the circle grid tree is produced to guide the motion of the USV. Then, the kinematics and dynamics of the USV are considered through the on-line trajectory generator by designing a relational function that links the rudder angle, heading angle, and the central angle of the circle grid. Finally, obstacle avoidance is achieved by leveraging the on-line trajectory generator to choose a safe, smooth, and efficient path for the USV. The experimental results indicate that the proposed method can avoid both static and dynamic obstacles, have better performance in terms of distance cost and steering cost comparing with the related methods, and our method only takes 50% steering cost of the grid-based method; the collision avoidance path not only conforms to the USV dynamic characteristic but also provides a reference of steering command.
The Review Unmanned Surface Vehicle Path Planning: Based on Multi-modality Constraint
Jul 03, 2020
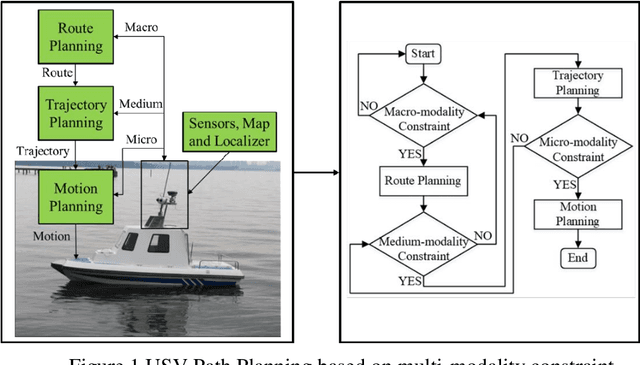

The essence of the path planning problems is multi-modality constraint. However, most of the current literature has not mentioned this issue. This paper introduces the research progress of path planning based on the multi-modality constraint. The path planning of multi-modality constraint research can be classified into three stages in terms of its basic ingredients (such as shape, kinematics and dynamics et al.): Route Planning, Trajectory Planning and Motion Planning. It then reviews the research methods and classical algorithms, especially those applied to the Unmanned Surface Vehicle (USV) in every stage. Finally, the paper points out some existing problems in every stage and suggestions for future research.
Deep Visual Waterline Detection within Inland Marine Environment
Nov 24, 2019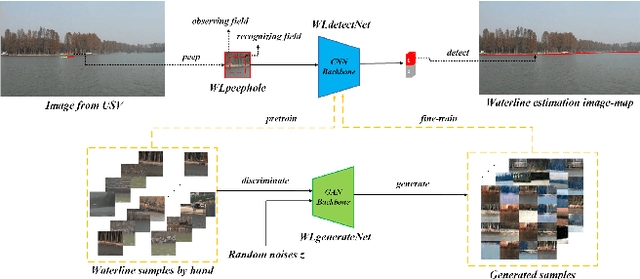
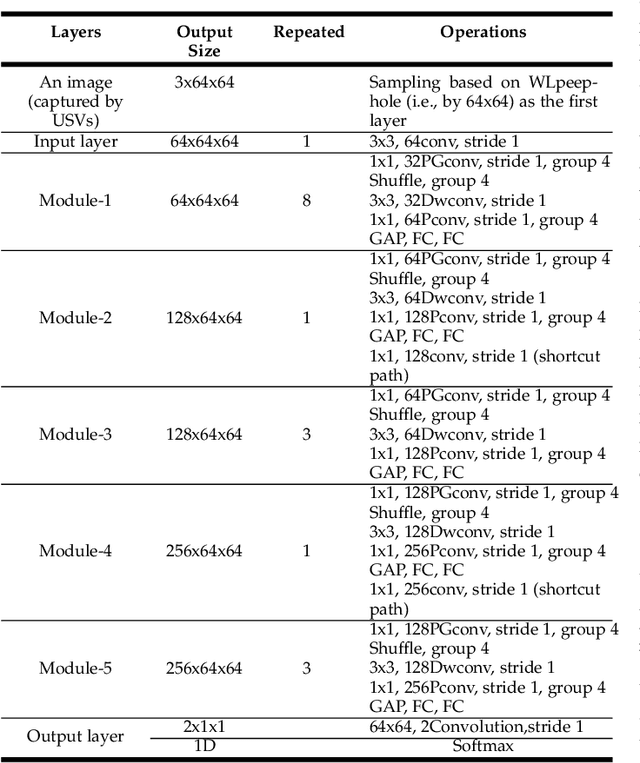

Waterline usually plays as an important visual cue for maritime applications. However, the visual complexity of inland waterline presents a significant challenge for the development of highly efficient computer vision algorithms tailored for waterline detection in a complicated inland water environment. This paper attempts to find a solution to guarantee the effectiveness of waterline detection for inland maritime applications with general digital camera sensor. To this end, a general deep-learning-based paradigm applicable in variable inland waters, named DeepWL, is proposed, which concerns the efficiency of waterline detection simultaneously. Specifically, there are two novel deep network models, named WLdetectNet and WLgenerateNet respectively, cooperating in the paradigm that afford a continuous waterline image-map estimation from a single captured video stream. Experimental results demonstrate the effectiveness and superiority of the proposed approach via qualitative and quantitative assessment on the concerned performances. Moreover, due to its own generality, the proposed approach has the potential to be applied to the waterline detection tasks of other water areas such as coastal waters.