 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGraph Attention Multi-Agent Fleet Autonomy for Advanced Air Mobility
Feb 16, 2023


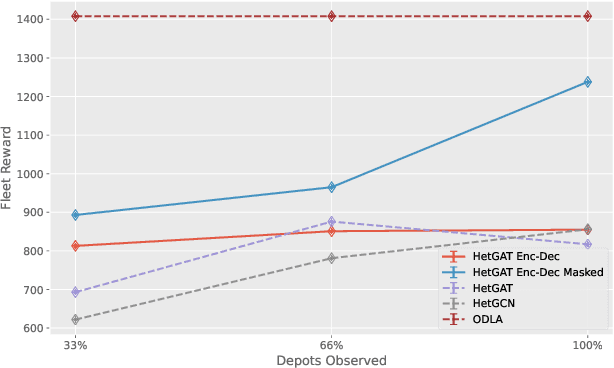
Autonomous mobility is emerging as a new mode of urban transportation for moving cargo and passengers. However, such fleet coordination schemes face significant challenges in scaling to accommodate fast-growing fleet sizes that vary in their operational range, capacity, and communication capabilities. We introduce the concept of partially observable advanced air mobility games to coordinate a fleet of aerial vehicle agents accounting for their heterogeneity and self-interest inherent to commercial mobility fleets. We propose a novel heterogeneous graph attention-based encoder-decoder (HetGAT Enc-Dec) neural network to construct a generalizable stochastic policy stemming from the inter- and intra-agent relations within the mobility system. We train our policy by leveraging deep multi-agent reinforcement learning, allowing decentralized decision-making for the agents using their local observations. Through extensive experimentation, we show that the fleets operating under the HetGAT Enc-Dec policy outperform other state-of-the-art graph neural network-based policies by achieving the highest fleet reward and fulfillment ratios in an on-demand mobility network.
Graphical Games for UAV Swarm Control Under Time-Varying Communication Networks
May 04, 2022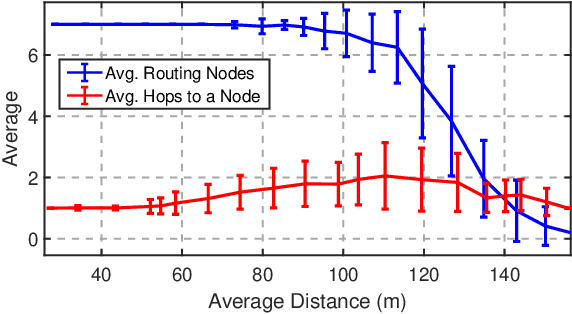
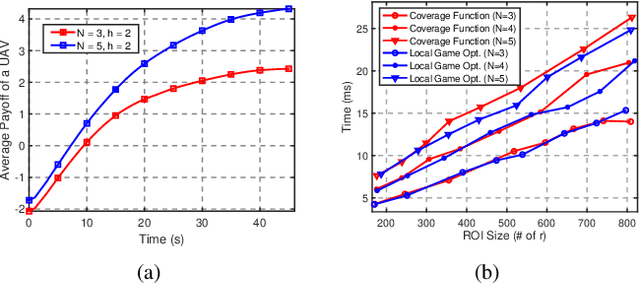
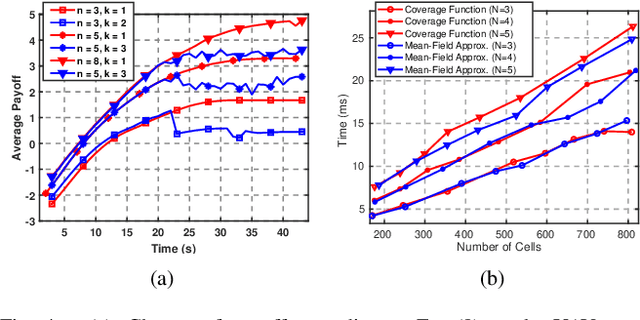
We propose a unified framework for coordinating Unmanned Aerial Vehicle (UAV) swarms operating under time-varying communication networks. Our framework builds on the concept of graphical games, which we argue provides a compelling paradigm to subsume the interaction structures found in networked UAV swarms thanks to the shared local neighborhood properties. We present a general-sum, factorizable payoff function for cooperative UAV swarms based on the aggregated local states and yield a Nash equilibrium for the stage games. Further, we propose a decomposition-based approach to solve stage-graphical games in a scalable and decentralized fashion by approximating virtual, mean neighborhoods. Finally, we discuss extending the proposed framework toward general-sum stochastic games by leveraging deep Q-learning and model-predictive control.
CoCo Games: Graphical Game-Theoretic Swarm Control for Communication-Aware Coverage
Nov 08, 2021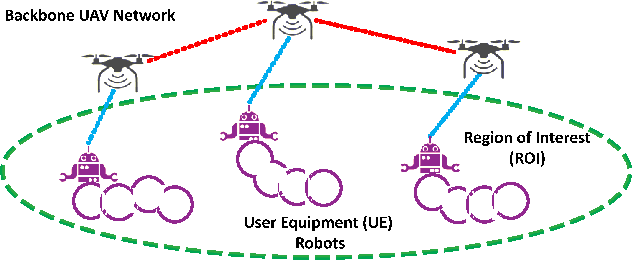
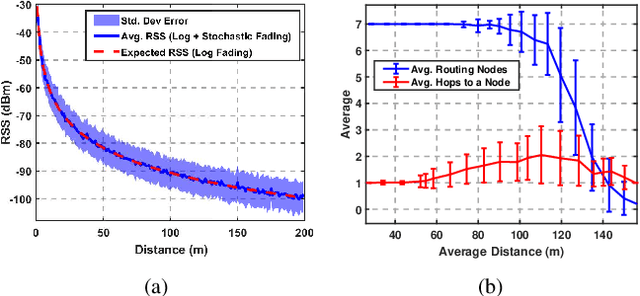
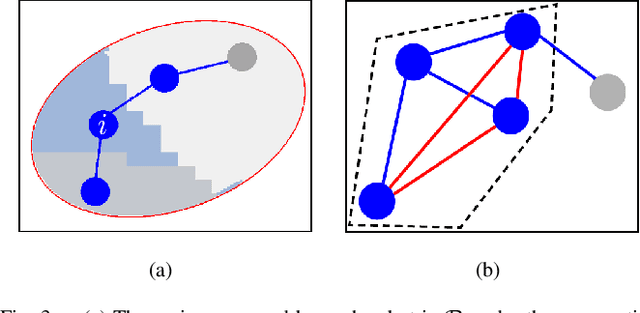
We present a novel approach to maximize the communication-aware coverage for robots operating over large-scale geographical regions of interest (ROIs). Our approach complements the underlying network topology in neighborhood selection and control, rendering it highly robust in dynamic environments. We formulate the coverage as a multi-stage, cooperative graphical game and employ Variational Inference (VI) to reach the equilibrium. We experimentally validate our approach in an mobile ad-hoc wireless network scenario using Unmanned Aerial Vehicles (UAV) and User Equipment (UE) robots. We show that it can cater to ROIs defined by stationary and moving User Equipment (UE) robots under realistic network conditions.
Online Flocking Control of UAVs with Mean-Field Approximation
Mar 28, 2021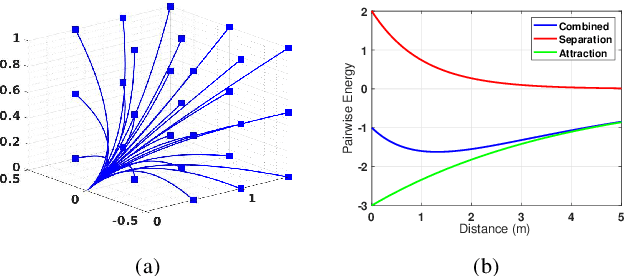
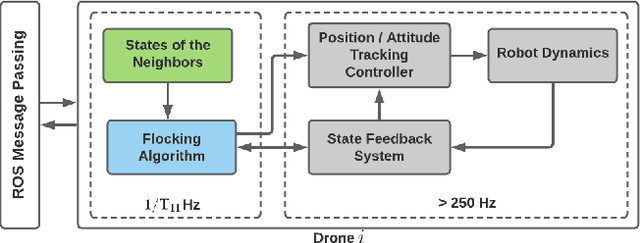

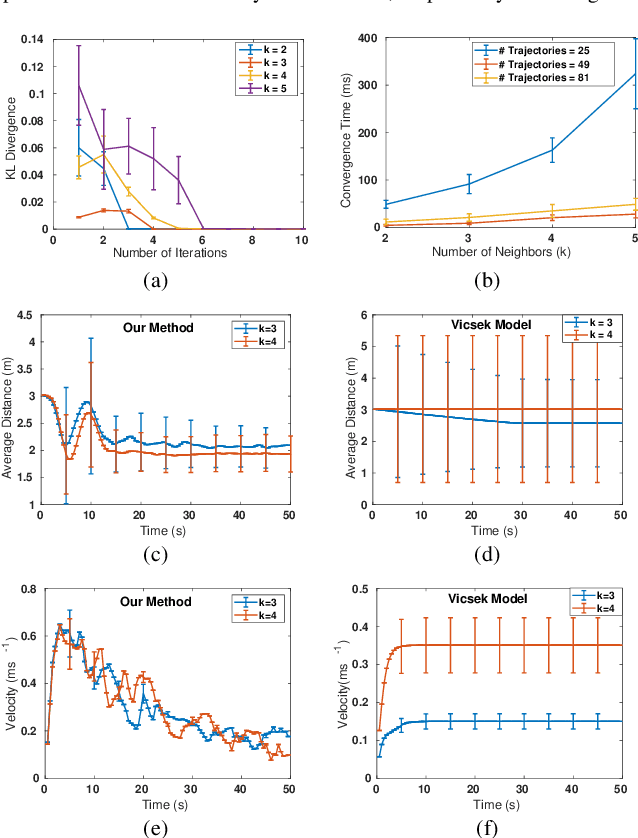
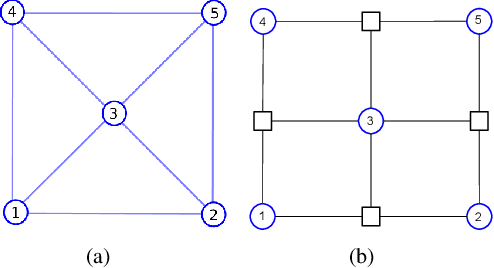
We present a novel approach to the formation controlling of aerial robot swarms that demonstrates the flocking behavior. The proposed method stems from the Unmanned Aerial Vehicle (UAV) dynamics; thus, it prevents any unattainable control inputs from being produced and subsequently leads to feasible trajectories. By modeling the inter-agent relationships using a pairwise energy function, we show that interacting robot swarms constitute a Markov Random Field. Our algorithm builds on the Mean-Field Approximation and incorporates the collective behavioral rules: cohesion, separation, and velocity alignment. We follow a distributed control scheme and show that our method can control a swarm of UAVs to a formation and velocity consensus with real-time collision avoidance. We validate the proposed method with physical and high-fidelity simulation experiments.
Swarming of Aerial Robots with Markov Random Field Optimization
Oct 22, 2020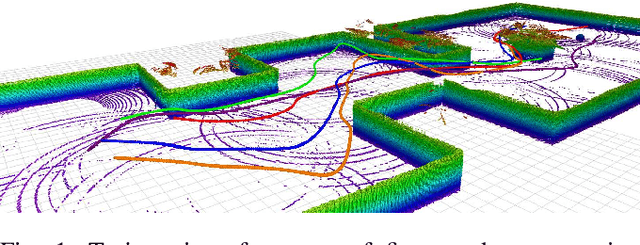

Swarms are highly robust systems that offer unique benefits compared to their alternatives. In this work, we propose a bio-inspired and artificial potential field-driven robot swarm control method, where the swarm formation dynamics are modeled on the basis of Markov Random Field (MRF) optimization. We integrate the internal agent-wise local interactions and external environmental influences into the MRF. The optimized formation configurations at different stages of the trajectory can be viewed as formation "shapes" which further allows us to integrate dynamics-constrained motion control of the robots. We show that this approach can be used to generate dynamically feasible trajectories to navigate teams of aerial robots in complex environments.