Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCoCo Games: Graphical Game-Theoretic Swarm Control for Communication-Aware Coverage
Paper and Code
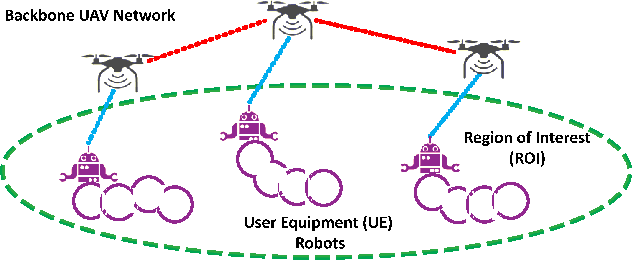
We present a novel approach to maximize the communication-aware coverage for robots operating over large-scale geographical regions of interest (ROIs). Our approach complements the underlying network topology in neighborhood selection and control, rendering it highly robust in dynamic environments. We formulate the coverage as a multi-stage, cooperative graphical game and employ Variational Inference (VI) to reach the equilibrium. We experimentally validate our approach in an mobile ad-hoc wireless network scenario using Unmanned Aerial Vehicles (UAV) and User Equipment (UE) robots. We show that it can cater to ROIs defined by stationary and moving User Equipment (UE) robots under realistic network conditions.
* 8 pages, 7 figures
View paper on