 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFirst, Learn What You Don't Know: Active Information Gathering for Driving at the Limits of Handling
Oct 31, 2024Combining data-driven models that adapt online and model predictive control (MPC) has enabled effective control of nonlinear systems. However, when deployed on unstable systems, online adaptation may not be fast enough to ensure reliable simultaneous learning and control. For example, controllers on a vehicle executing highly dynamic maneuvers may push the tires to their friction limits, destabilizing the vehicle and allowing modeling errors to quickly compound and cause a loss of control. In this work, we present a Bayesian meta-learning MPC framework. We propose an expressive vehicle dynamics model that leverages Bayesian last-layer meta-learning to enable rapid online adaptation. The model's uncertainty estimates are used to guide informative data collection and quickly improve the model prior to deployment. Experiments on a Toyota Supra show that (i) the framework enables reliable control in dynamic drifting maneuvers, (ii) online adaptation alone may not suffice for zero-shot control of a vehicle at the edge of stability, and (iii) active data collection helps achieve reliable performance.
Reference-Free Formula Drift with Reinforcement Learning: From Driving Data to Tire Energy-Inspired, Real-World Policies
Oct 28, 2024



The skill to drift a car--i.e., operate in a state of controlled oversteer like professional drivers--could give future autonomous cars maximum flexibility when they need to retain control in adverse conditions or avoid collisions. We investigate real-time drifting strategies that put the car where needed while bypassing expensive trajectory optimization. To this end, we design a reinforcement learning agent that builds on the concept of tire energy absorption to autonomously drift through changing and complex waypoint configurations while safely staying within track bounds. We achieve zero-shot deployment on the car by training the agent in a simulation environment built on top of a neural stochastic differential equation vehicle model learned from pre-collected driving data. Experiments on a Toyota GR Supra and Lexus LC 500 show that the agent is capable of drifting smoothly through varying waypoint configurations with tracking error as low as 10 cm while stably pushing the vehicles to sideslip angles of up to 63{\deg}.
Risk-Averse Model Predictive Control for Racing in Adverse Conditions
Oct 22, 2024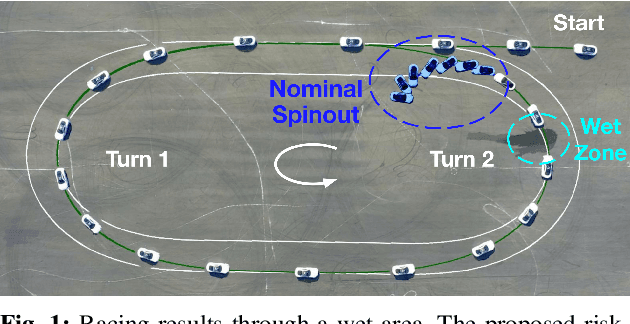
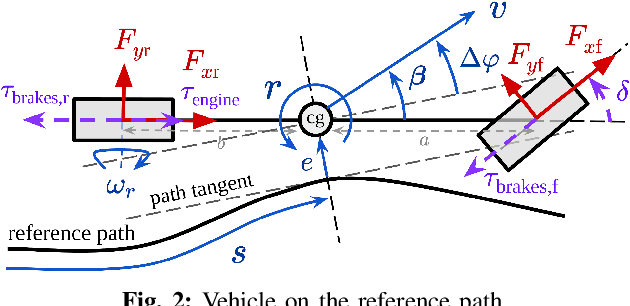
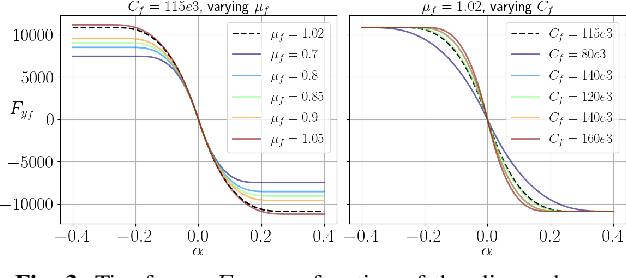
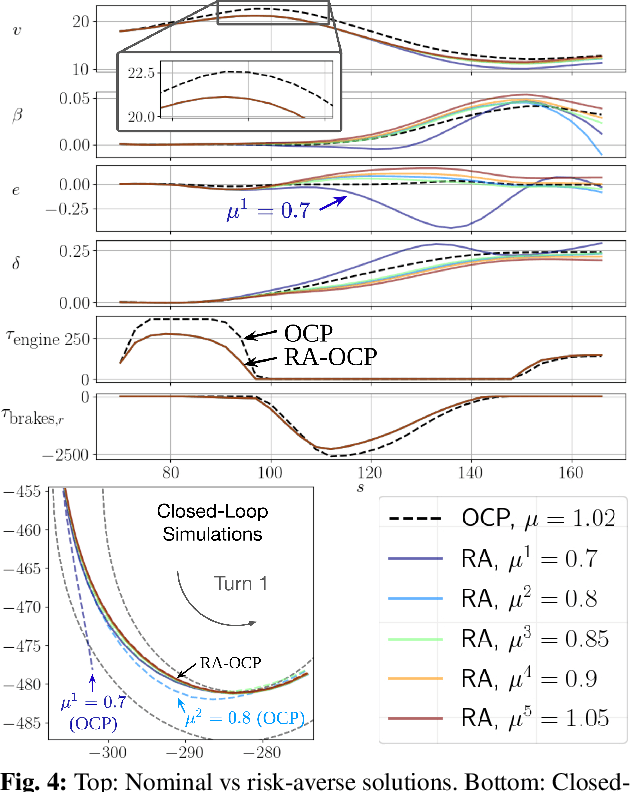
Model predictive control (MPC) algorithms can be sensitive to model mismatch when used in challenging nonlinear control tasks. In particular, the performance of MPC for vehicle control at the limits of handling suffers when the underlying model overestimates the vehicle's capabilities. In this work, we propose a risk-averse MPC framework that explicitly accounts for uncertainty over friction limits and tire parameters. Our approach leverages a sample-based approximation of an optimal control problem with a conditional value at risk (CVaR) constraint. This sample-based formulation enables planning with a set of expressive vehicle dynamics models using different tire parameters. Moreover, this formulation enables efficient numerical resolution via sequential quadratic programming and GPU parallelization. Experiments on a Lexus LC 500 show that risk-averse MPC unlocks reliable performance, while a deterministic baseline that plans using a single dynamics model may lose control of the vehicle in adverse road conditions.