 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeneralising Traffic Forecasting to Regions without Traffic Observations
Aug 12, 2025Traffic forecasting is essential for intelligent transportation systems. Accurate forecasting relies on continuous observations collected by traffic sensors. However, due to high deployment and maintenance costs, not all regions are equipped with such sensors. This paper aims to forecast for regions without traffic sensors, where the lack of historical traffic observations challenges the generalisability of existing models. We propose a model named GenCast, the core idea of which is to exploit external knowledge to compensate for the missing observations and to enhance generalisation. We integrate physics-informed neural networks into GenCast, enabling physical principles to regularise the learning process. We introduce an external signal learning module to explore correlations between traffic states and external signals such as weather conditions, further improving model generalisability. Additionally, we design a spatial grouping module to filter localised features that hinder model generalisability. Extensive experiments show that GenCast consistently reduces forecasting errors on multiple real-world datasets.
DualCast: Disentangling Aperiodic Events from Traffic Series with a Dual-Branch Model
Nov 27, 2024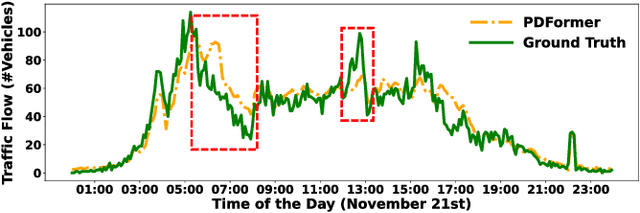
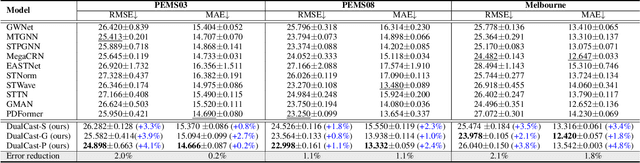
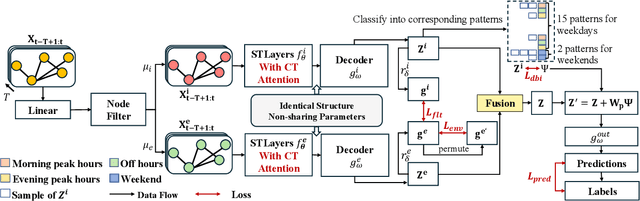
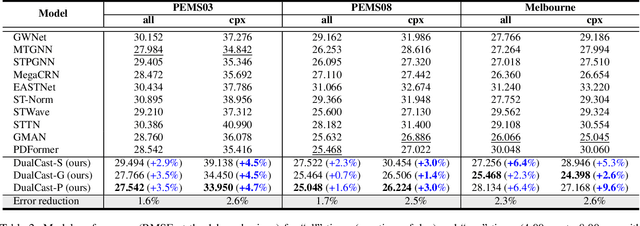
Traffic forecasting is an important problem in the operation and optimisation of transportation systems. State-of-the-art solutions train machine learning models by minimising the mean forecasting errors on the training data. The trained models often favour periodic events instead of aperiodic ones in their prediction results, as periodic events often prevail in the training data. While offering critical optimisation opportunities, aperiodic events such as traffic incidents may be missed by the existing models. To address this issue, we propose DualCast -- a model framework to enhance the learning capability of traffic forecasting models, especially for aperiodic events. DualCast takes a dual-branch architecture, to disentangle traffic signals into two types, one reflecting intrinsic {spatial-temporal} patterns and the other reflecting external environment contexts including aperiodic events. We further propose a cross-time attention mechanism, to capture high-order spatial-temporal relationships from both periodic and aperiodic patterns. DualCast is versatile. We integrate it with recent traffic forecasting models, consistently reducing their forecasting errors by up to 9.6% on multiple real datasets.
Spatial-temporal Forecasting for Regions without Observations
Jan 19, 2024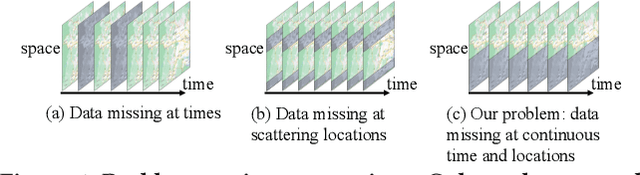
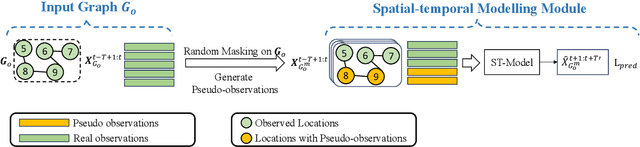
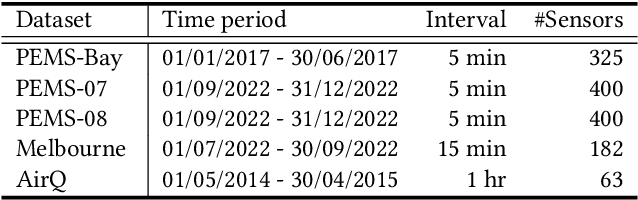
Spatial-temporal forecasting plays an important role in many real-world applications, such as traffic forecasting, air pollutant forecasting, crowd-flow forecasting, and so on. State-of-the-art spatial-temporal forecasting models take data-driven approaches and rely heavily on data availability. Such models suffer from accuracy issues when data is incomplete, which is common in reality due to the heavy costs of deploying and maintaining sensors for data collection. A few recent studies attempted to address the issue of incomplete data. They typically assume some data availability in a region of interest either for a short period or at a few locations. In this paper, we further study spatial-temporal forecasting for a region of interest without any historical observations, to address scenarios such as unbalanced region development, progressive deployment of sensors or lack of open data. We propose a model named STSM for the task. The model takes a contrastive learning-based approach to learn spatial-temporal patterns from adjacent regions that have recorded data. Our key insight is to learn from the locations that resemble those in the region of interest, and we propose a selective masking strategy to enable the learning. As a result, our model outperforms adapted state-of-the-art models, reducing errors consistently over both traffic and air pollutant forecasting tasks. The source code is available at https://github.com/suzy0223/STSM.
A Graph and Attentive Multi-Path Convolutional Network for Traffic Prediction
May 30, 2022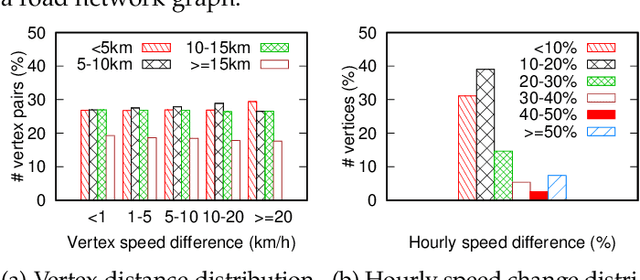
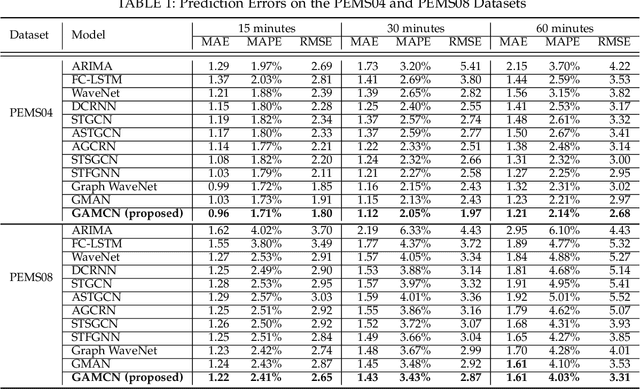
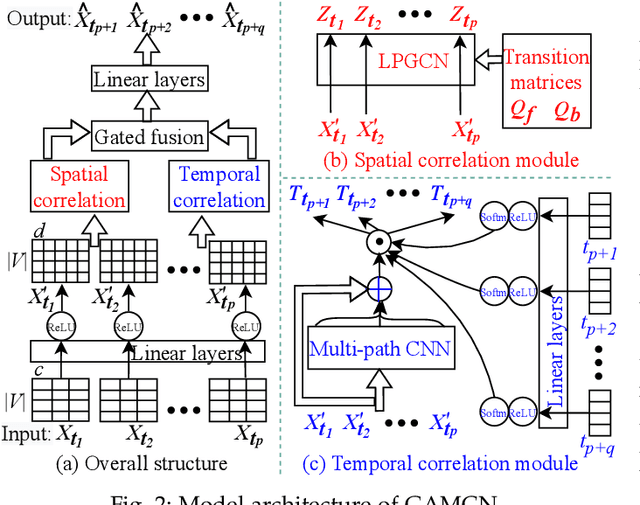
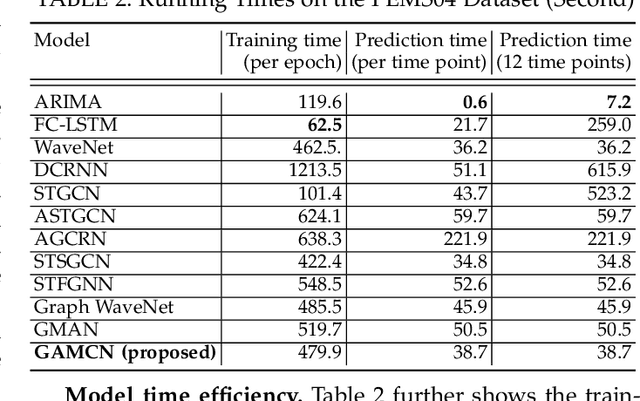
Traffic prediction is an important and yet highly challenging problem due to the complexity and constantly changing nature of traffic systems. To address the challenges, we propose a graph and attentive multi-path convolutional network (GAMCN) model to predict traffic conditions such as traffic speed across a given road network into the future. Our model focuses on the spatial and temporal factors that impact traffic conditions. To model the spatial factors, we propose a variant of the graph convolutional network (GCN) named LPGCN to embed road network graph vertices into a latent space, where vertices with correlated traffic conditions are close to each other. To model the temporal factors, we use a multi-path convolutional neural network (CNN) to learn the joint impact of different combinations of past traffic conditions on the future traffic conditions. Such a joint impact is further modulated by an attention} generated from an embedding of the prediction time, which encodes the periodic patterns of traffic conditions. We evaluate our model on real-world road networks and traffic data. The experimental results show that our model outperforms state-of-art traffic prediction models by up to 18.9% in terms of prediction errors and 23.4% in terms of prediction efficiency.