 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHuman-Centric Traffic Signal Control for Equity: A Multi-Agent Action Branching Deep Reinforcement Learning Approach
Feb 03, 2026Coordinating traffic signals along multimodal corridors is challenging because many multi-agent deep reinforcement learning (DRL) approaches remain vehicle-centric and struggle with high-dimensional discrete action spaces. We propose MA2B-DDQN, a human-centric multi-agent action-branching double Deep Q-Network (DQN) framework that explicitly optimizes traveler-level equity. Our key contribution is an action-branching discrete control formulation that decomposes corridor control into (i) local, per-intersection actions that allocate green time between the next two phases and (ii) a single global action that selects the total duration of those phases. This decomposition enables scalable coordination under discrete control while reducing the effective complexity of joint decision-making. We also design a human-centric reward that penalizes the number of delayed individuals in the corridor, accounting for pedestrians, vehicle occupants, and transit passengers. Extensive evaluations across seven realistic traffic scenarios in Melbourne, Australia, demonstrate that our approach significantly reduces the number of impacted travelers, outperforming existing DRL and baseline methods. Experiments confirm the robustness of our model, showing minimal variance across diverse settings. This framework not only advocates for a fairer traffic signal system but also provides a scalable solution adaptable to varied urban traffic conditions.
A Graph and Attentive Multi-Path Convolutional Network for Traffic Prediction
May 30, 2022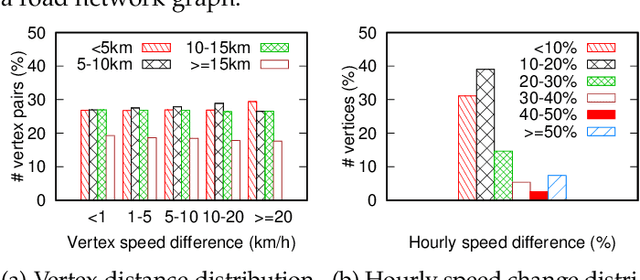
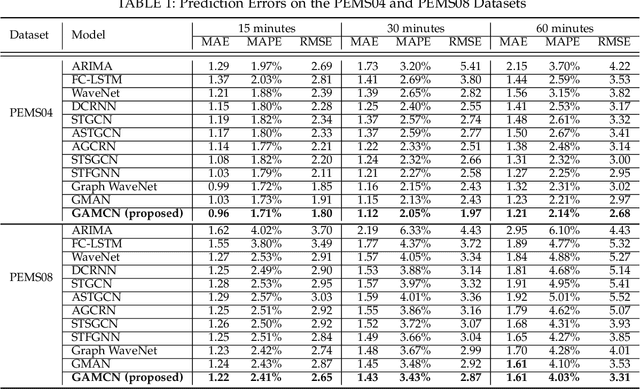
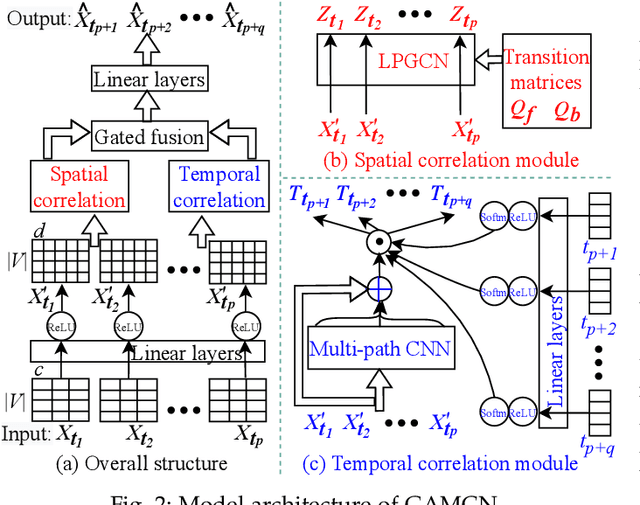
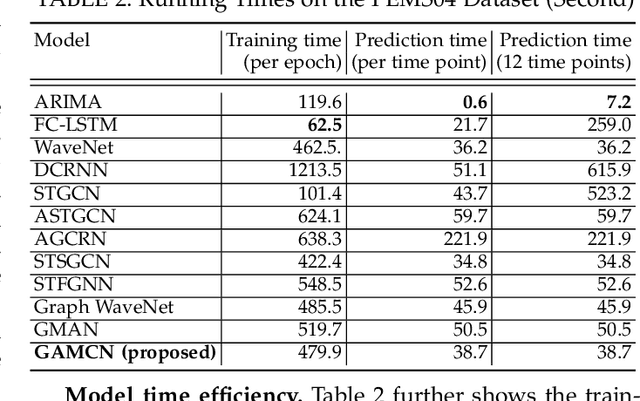
Traffic prediction is an important and yet highly challenging problem due to the complexity and constantly changing nature of traffic systems. To address the challenges, we propose a graph and attentive multi-path convolutional network (GAMCN) model to predict traffic conditions such as traffic speed across a given road network into the future. Our model focuses on the spatial and temporal factors that impact traffic conditions. To model the spatial factors, we propose a variant of the graph convolutional network (GCN) named LPGCN to embed road network graph vertices into a latent space, where vertices with correlated traffic conditions are close to each other. To model the temporal factors, we use a multi-path convolutional neural network (CNN) to learn the joint impact of different combinations of past traffic conditions on the future traffic conditions. Such a joint impact is further modulated by an attention} generated from an embedding of the prediction time, which encodes the periodic patterns of traffic conditions. We evaluate our model on real-world road networks and traffic data. The experimental results show that our model outperforms state-of-art traffic prediction models by up to 18.9% in terms of prediction errors and 23.4% in terms of prediction efficiency.