 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Streetscape Application Services Stack (SASS): Towards a Distributed Sensing Architecture for Urban Applications
Nov 29, 2024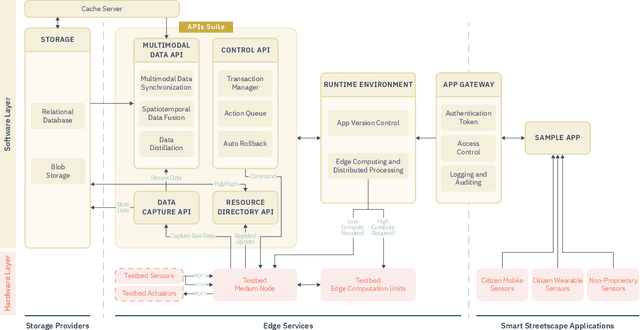
As urban populations grow, cities are becoming more complex, driving the deployment of interconnected sensing systems to realize the vision of smart cities. These systems aim to improve safety, mobility, and quality of life through applications that integrate diverse sensors with real-time decision-making. Streetscape applications-focusing on challenges like pedestrian safety and adaptive traffic management-depend on managing distributed, heterogeneous sensor data, aligning information across time and space, and enabling real-time processing. These tasks are inherently complex and often difficult to scale. The Streetscape Application Services Stack (SASS) addresses these challenges with three core services: multimodal data synchronization, spatiotemporal data fusion, and distributed edge computing. By structuring these capabilities as clear, composable abstractions with clear semantics, SASS allows developers to scale streetscape applications efficiently while minimizing the complexity of multimodal integration. We evaluated SASS in two real-world testbed environments: a controlled parking lot and an urban intersection in a major U.S. city. These testbeds allowed us to test SASS under diverse conditions, demonstrating its practical applicability. The Multimodal Data Synchronization service reduced temporal misalignment errors by 88%, achieving synchronization accuracy within 50 milliseconds. Spatiotemporal Data Fusion service improved detection accuracy for pedestrians and vehicles by over 10%, leveraging multicamera integration. The Distributed Edge Computing service increased system throughput by more than an order of magnitude. Together, these results show how SASS provides the abstractions and performance needed to support real-time, scalable urban applications, bridging the gap between sensing infrastructure and actionable streetscape intelligence.
Constellation Dataset: Benchmarking High-Altitude Object Detection for an Urban Intersection
Apr 25, 2024



We introduce Constellation, a dataset of 13K images suitable for research on detection of objects in dense urban streetscapes observed from high-elevation cameras, collected for a variety of temporal conditions. The dataset addresses the need for curated data to explore problems in small object detection exemplified by the limited pixel footprint of pedestrians observed tens of meters from above. It enables the testing of object detection models for variations in lighting, building shadows, weather, and scene dynamics. We evaluate contemporary object detection architectures on the dataset, observing that state-of-the-art methods have lower performance in detecting small pedestrians compared to vehicles, corresponding to a 10% difference in average precision (AP). Using structurally similar datasets for pretraining the models results in an increase of 1.8% mean AP (mAP). We further find that incorporating domain-specific data augmentations helps improve model performance. Using pseudo-labeled data, obtained from inference outcomes of the best-performing models, improves the performance of the models. Finally, comparing the models trained using the data collected in two different time intervals, we find a performance drift in models due to the changes in intersection conditions over time. The best-performing model achieves a pedestrian AP of 92.0% with 11.5 ms inference time on NVIDIA A100 GPUs, and an mAP of 95.4%.