 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImproved GQ-CNN: Deep Learning Model for Planning Robust Grasps
Feb 16, 2018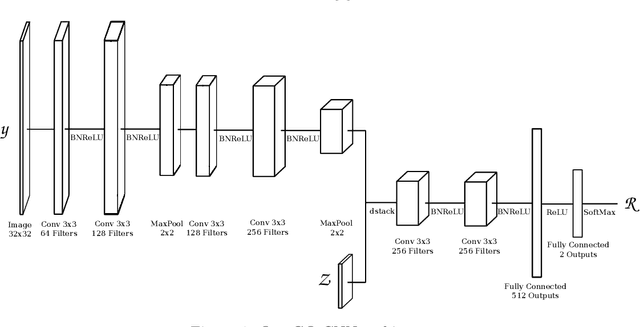
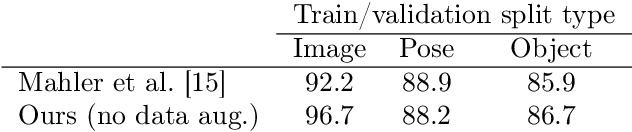
Recent developments in the field of robot grasping have shown great improvements in the grasp success rates when dealing with unknown objects. In this work we improve on one of the most promising approaches, the Grasp Quality Convolutional Neural Network (GQ-CNN) trained on the DexNet 2.0 dataset. We propose a new architecture for the GQ-CNN and describe practical improvements that increase the model validation accuracy from 92.2% to 95.8% and from 85.9% to 88.0% on respectively image-wise and object-wise training and validation splits.
Atari games and Intel processors
May 19, 2017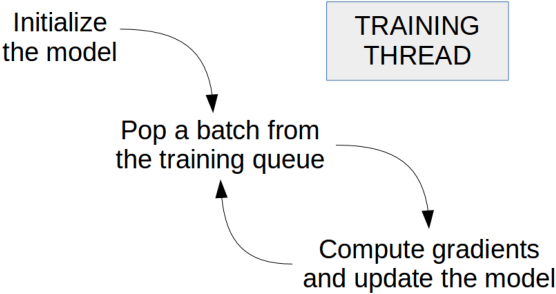
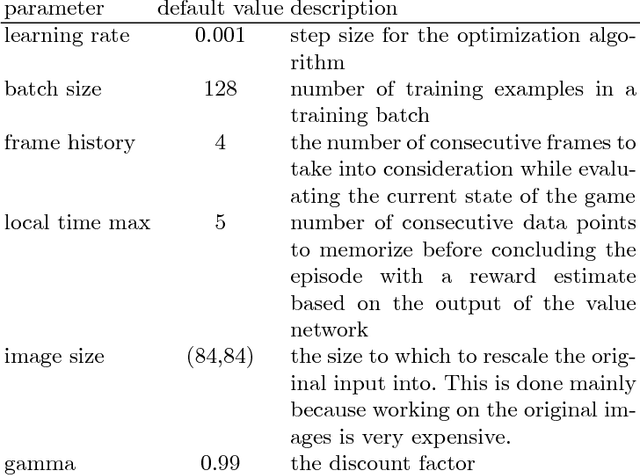
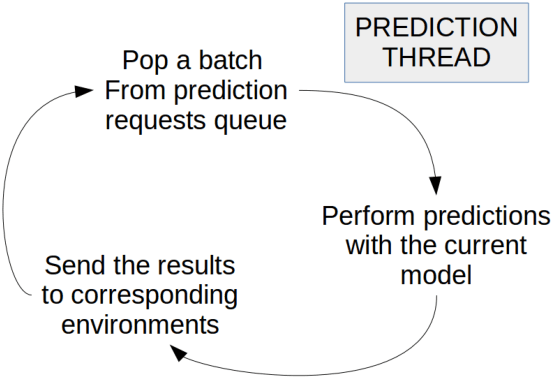
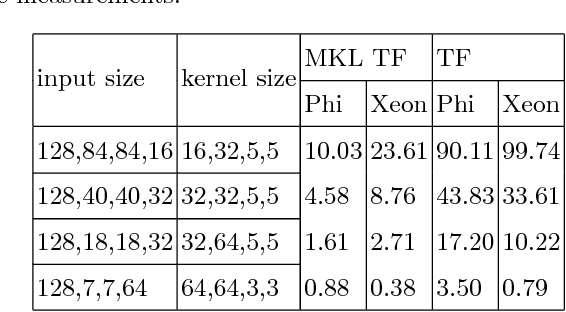
The asynchronous nature of the state-of-the-art reinforcement learning algorithms such as the Asynchronous Advantage Actor-Critic algorithm, makes them exceptionally suitable for CPU computations. However, given the fact that deep reinforcement learning often deals with interpreting visual information, a large part of the train and inference time is spent performing convolutions. In this work we present our results on learning strategies in Atari games using a Convolutional Neural Network, the Math Kernel Library and TensorFlow 0.11rc0 machine learning framework. We also analyze effects of asynchronous computations on the convergence of reinforcement learning algorithms.