Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImproved GQ-CNN: Deep Learning Model for Planning Robust Grasps
Feb 16, 2018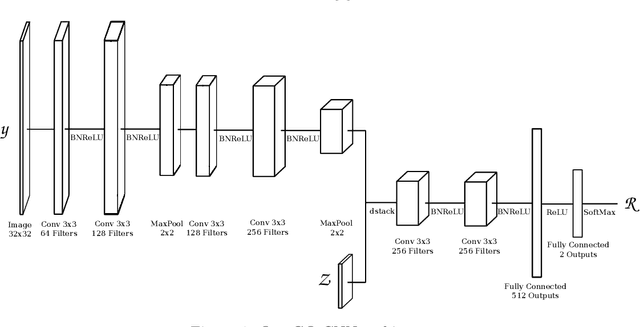
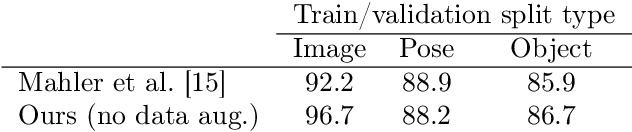
Recent developments in the field of robot grasping have shown great improvements in the grasp success rates when dealing with unknown objects. In this work we improve on one of the most promising approaches, the Grasp Quality Convolutional Neural Network (GQ-CNN) trained on the DexNet 2.0 dataset. We propose a new architecture for the GQ-CNN and describe practical improvements that increase the model validation accuracy from 92.2% to 95.8% and from 85.9% to 88.0% on respectively image-wise and object-wise training and validation splits.
* 6 pages, 3 figures
Via