 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOvercoming Overfitting in Reinforcement Learning via Gaussian Process Diffusion Policy
Jun 16, 2025One of the key challenges that Reinforcement Learning (RL) faces is its limited capability to adapt to a change of data distribution caused by uncertainties. This challenge arises especially in RL systems using deep neural networks as decision makers or policies, which are prone to overfitting after prolonged training on fixed environments. To address this challenge, this paper proposes Gaussian Process Diffusion Policy (GPDP), a new algorithm that integrates diffusion models and Gaussian Process Regression (GPR) to represent the policy. GPR guides diffusion models to generate actions that maximize learned Q-function, resembling the policy improvement in RL. Furthermore, the kernel-based nature of GPR enhances the policy's exploration efficiency under distribution shifts at test time, increasing the chance of discovering new behaviors and mitigating overfitting. Simulation results on the Walker2d benchmark show that our approach outperforms state-of-the-art algorithms under distribution shift condition by achieving around 67.74% to 123.18% improvement in the RL's objective function while maintaining comparable performance under normal conditions.
PViT: Prior-augmented Vision Transformer for Out-of-distribution Detection
Oct 27, 2024Vision Transformers (ViTs) have achieved remarkable success over various vision tasks, yet their robustness against data distribution shifts and inherent inductive biases remain underexplored. To enhance the robustness of ViT models for image Out-of-Distribution (OOD) detection, we introduce a novel and generic framework named Prior-augmented Vision Transformer (PViT). PViT identifies OOD samples by quantifying the divergence between the predicted class logits and the prior logits obtained from pre-trained models. Unlike existing state-of-the-art OOD detection methods, PViT shapes the decision boundary between ID and OOD by utilizing the proposed prior guide confidence, without requiring additional data modeling, generation methods, or structural modifications. Extensive experiments on the large-scale ImageNet benchmark demonstrate that PViT significantly outperforms existing state-of-the-art OOD detection methods. Additionally, through comprehensive analyses, ablation studies, and discussions, we show how PViT can strategically address specific challenges in managing large vision models, paving the way for new advancements in OOD detection.
MorphoSeg: An Uncertainty-Aware Deep Learning Method for Biomedical Segmentation of Complex Cellular Morphologies
Sep 25, 2024



Deep learning has revolutionized medical and biological imaging, particularly in segmentation tasks. However, segmenting biological cells remains challenging due to the high variability and complexity of cell shapes. Addressing this challenge requires high-quality datasets that accurately represent the diverse morphologies found in biological cells. Existing cell segmentation datasets are often limited by their focus on regular and uniform shapes. In this paper, we introduce a novel benchmark dataset of Ntera-2 (NT2) cells, a pluripotent carcinoma cell line, exhibiting diverse morphologies across multiple stages of differentiation, capturing the intricate and heterogeneous cellular structures that complicate segmentation tasks. To address these challenges, we propose an uncertainty-aware deep learning framework for complex cellular morphology segmentation (MorphoSeg) by incorporating sampling of virtual outliers from low-likelihood regions during training. Our comprehensive experimental evaluations against state-of-the-art baselines demonstrate that MorphoSeg significantly enhances segmentation accuracy, achieving up to a 7.74% increase in the Dice Similarity Coefficient (DSC) and a 28.36% reduction in the Hausdorff Distance. These findings highlight the effectiveness of our dataset and methodology in advancing cell segmentation capabilities, especially for complex and variable cell morphologies. The dataset and source code is publicly available at https://github.com/RanchoGoose/MorphoSeg.
3, 2, 1, Drones Go! A Testbed to Take off UAV Swarm Intelligence for Distributed Sensing
Aug 11, 2022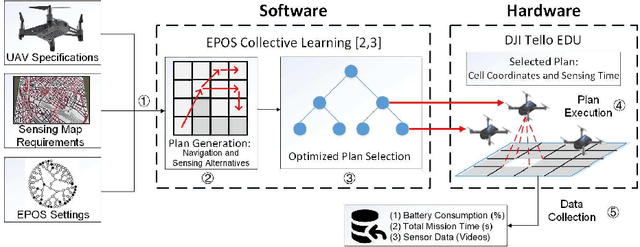
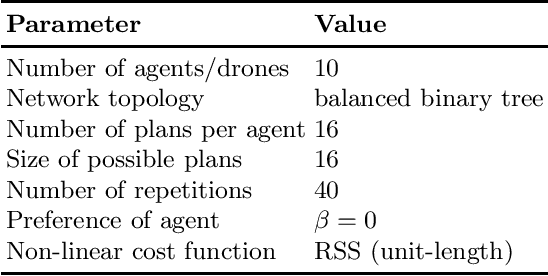
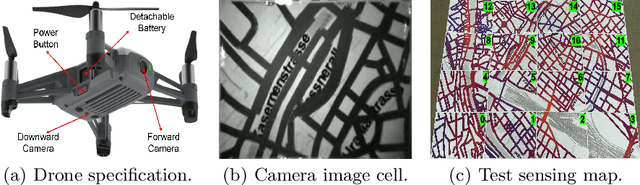
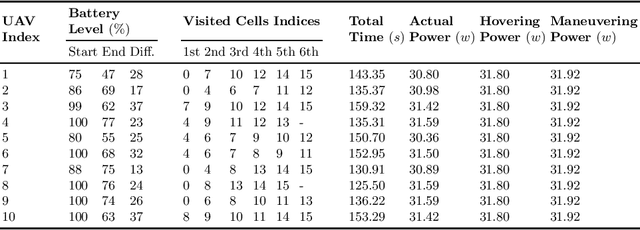
This paper introduces a testbed to study distributed sensing problems of Unmanned Aerial Vehicles (UAVs) exhibiting swarm intelligence. Several Smart City applications, such as transport and disaster response, require efficient collection of sensor data by a swarm of intelligent and cooperative UAVs. This often proves to be too complex and costly to study systematically and rigorously without compromising scale, realism and external validity. With the proposed testbed, this paper sets a stepping stone to emulate, within small laboratory spaces, large sensing areas of interest originated from empirical data and simulation models. Over this sensing map, a swarm of low-cost drones can fly allowing the study of a large spectrum of problems such as energy consumption, charging control, navigation and collision avoidance. The applicability of a decentralized multi-agent collective learning algorithm (EPOS) for UAV swarm intelligence along with the assessment of power consumption measurements provide a proof-of-concept and validate the accuracy of the proposed testbed.