 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAI-Mediated Explainable Regulation for Justice
Mar 31, 2026Present practice of deciding on regulation faces numerous problems that make adopted regulations static, unexplained, unduly influenced by powerful interest groups, and stained with a perception of illegitimacy. These well-known problems with the regulatory process can lead to injustice and have substantial negative effects on society and democracy. We discuss a new approach that utilizes distributed artificial intelligence (AI) to make a regulatory recommendation that is explainable and adaptable by design. We outline the main components of a system that can implement this approach and show how it would resolve the problems with the present regulatory system. This approach models and reasons about stakeholder preferences with separate preference models, while it aggregates these preferences in a value sensitive way. Such recommendations can be updated due to changes in facts or in values and are inherently explainable. We suggest how stakeholders can make their preferences known to the system and how they can verify whether they were properly considered in the regulatory decision. The resulting system promises to support regulatory justice, legitimacy, and compliance.
Fair Voting Methods as a Catalyst for Democratic Resilience: A Trilogy on Legitimacy, Impact and AI Safeguarding
Dec 19, 2025
This article shows how fair voting methods can be a catalyst for change in the way we make collective decisions, and how such change can promote long-awaited upgrades of democracy. Based on real-world evidence from democratic innovations in participatory budgeting, in Switzerland and beyond, I highlight a trilogy of key research results: Fair voting methods achieve to be (i) legitimacy incubator, (ii) novel impact accelerator and (iii) safeguard for risks of artificial intelligence (AI). Compared to majoritarian voting methods, combining expressive ballot formats (e.g. cumulative voting) with ballot aggregation methods that promote proportional representation (e.g. equal shares) results in more winners and higher (geographical) representation of citizens. Such fair voting methods are preferred and found fairer even by voters who do not win, while promoting stronger democratic values for citizens such as altruism and compromise. They also result in new resourceful ideas to put for voting, which are cost-effective and win, especially in areas of welfare, education and culture. Strikingly, fair voting methods are also more resilient to biases and inconsistencies of generative AI in emerging scenarios of AI voting assistance or AI representation of voters who would be likely to abstain. I also review the relevance of such upgrades for democracies in crisis, such as the one of Greece featured in the recent study of `Unmute Democracy'. Greek democracy can build stronger resilience via higher representation of citizens in democratic processes as well as democratic innovations in participation. Fair voting methods can be a catalyst for both endeavors.
Coordinated Multi-Drone Last-mile Delivery: Learning Strategies for Energy-aware and Timely Operations
Sep 19, 2025Drones have recently emerged as a faster, safer, and cost-efficient way for last-mile deliveries of parcels, particularly for urgent medical deliveries highlighted during the pandemic. This paper addresses a new challenge of multi-parcel delivery with a swarm of energy-aware drones, accounting for time-sensitive customer requirements. Each drone plans an optimal multi-parcel route within its battery-restricted flight range to minimize delivery delays and reduce energy consumption. The problem is tackled by decomposing it into three sub-problems: (1) optimizing depot locations and service areas using K-means clustering; (2) determining the optimal flight range for drones through reinforcement learning; and (3) planning and selecting multi-parcel delivery routes via a new optimized plan selection approach. To integrate these solutions and enhance long-term efficiency, we propose a novel algorithm leveraging actor-critic-based multi-agent deep reinforcement learning. Extensive experimentation using realistic delivery datasets demonstrate an exceptional performance of the proposed algorithm. We provide new insights into economic efficiency (minimize energy consumption), rapid operations (reduce delivery delays and overall execution time), and strategic guidance on depot deployment for practical logistics applications.
Fair Compromises in Participatory Budgeting: a Multi-Agent Deep Reinforcement Learning Approach
Jul 23, 2025Participatory budgeting is a method of collectively understanding and addressing spending priorities where citizens vote on how a budget is spent, it is regularly run to improve the fairness of the distribution of public funds. Participatory budgeting requires voters to make decisions on projects which can lead to ``choice overload". A multi-agent reinforcement learning approach to decision support can make decision making easier for voters by identifying voting strategies that increase the winning proportion of their vote. This novel approach can also support policymakers by highlighting aspects of election design that enable fair compromise on projects. This paper presents a novel, ethically aligned approach to decision support using multi-agent deep reinforcement learning modelling. This paper introduces a novel use of a branching neural network architecture to overcome scalability challenges of multi-agent reinforcement learning in a decentralized way. Fair compromises are found through optimising voter actions towards greater representation of voter preferences in the winning set. Experimental evaluation with real-world participatory budgeting data reveals a pattern in fair compromise: that it is achievable through projects with smaller cost.
Upgrading Democracies with Fairer Voting Methods
May 20, 2025
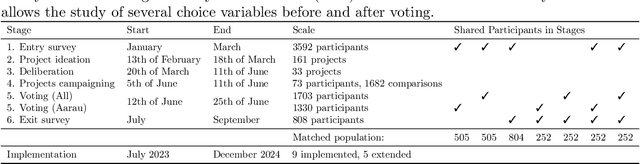
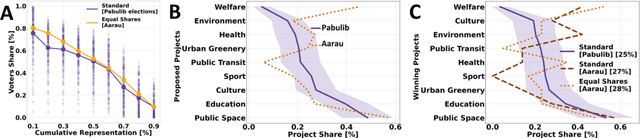

Voting methods are instrumental design element of democracies. Citizens use them to express and aggregate their preferences to reach a collective decision. However, voting outcomes can be as sensitive to voting rules as they are to people's voting choices. Despite the significance and inter-disciplinary scientific progress on voting methods, several democracies keep relying on outdated voting methods that do not fit modern, pluralistic societies well, while lacking social innovation. Here, we demonstrate how one can upgrade real-world democracies, namely by using alternative preferential voting methods such as cumulative voting and the method of equal shares designed for a proportional representation of voters' preferences. By rigorously assessing a new participatory budgeting approach applied in the city of Aarau, Switzerland, we unravel the striking voting outcomes of fair voting methods: more winning projects with the same budget and broader geographic and preference representation of citizens by the elected projects, in particular for voters who used to be under-represented, while promoting novel project ideas. We provide profound causal evidence showing that citizens prefer proportional voting methods, which possess strong legitimacy without the need of very technical specialized explanations. We also reveal strong underlying democratic values exhibited by citizens who support fair voting methods such as altruism and compromise. These findings come with a global momentum to unleash a new and long-awaited participation blueprint of how to upgrade democracies.
M-SET: Multi-Drone Swarm Intelligence Experimentation with Collision Avoidance Realism
Jun 16, 2024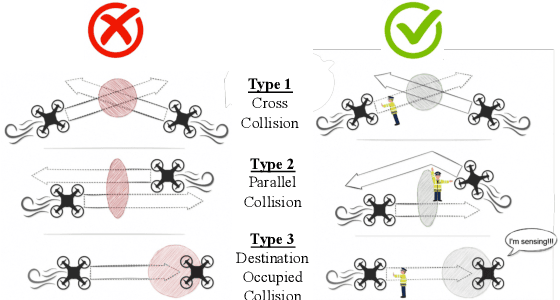
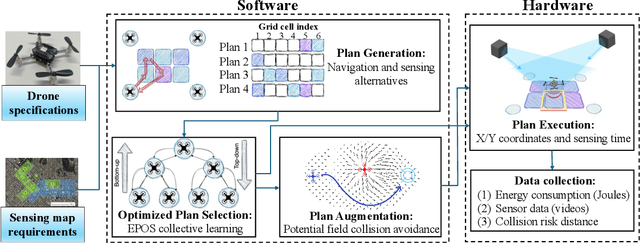
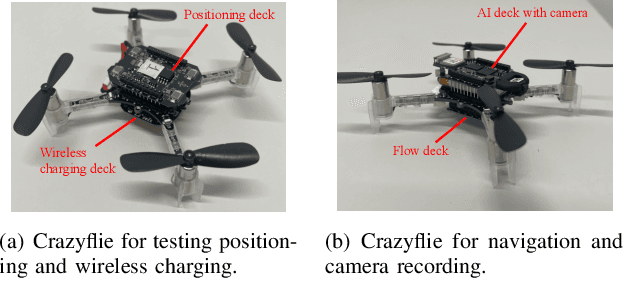
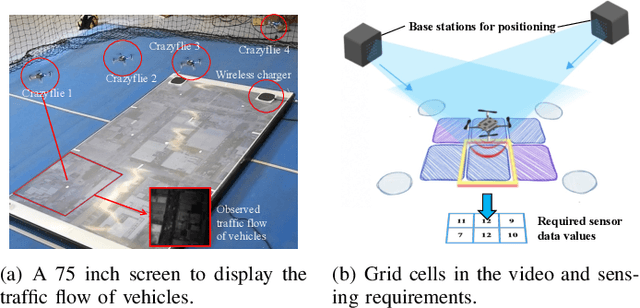
Distributed sensing by cooperative drone swarms is crucial for several Smart City applications, such as traffic monitoring and disaster response. Using an indoor lab with inexpensive drones, a testbed supports complex and ambitious studies on these systems while maintaining low cost, rigor, and external validity. This paper introduces the Multi-drone Sensing Experimentation Testbed (M-SET), a novel platform designed to prototype, develop, test, and evaluate distributed sensing with swarm intelligence. M-SET addresses the limitations of existing testbeds that fail to emulate collisions, thus lacking realism in outdoor environments. By integrating a collision avoidance method based on a potential field algorithm, M-SET ensures collision-free navigation and sensing, further optimized via a multi-agent collective learning algorithm. Extensive evaluation demonstrates accurate energy consumption estimation and a low risk of collisions, providing a robust proof-of-concept. New insights show that M-SET has significant potential to support ambitious research with minimal cost, simplicity, and high sensing quality.
Short vs. Long-term Coordination of Drones: When Distributed Optimization Meets Deep Reinforcement Learning
Nov 16, 2023



Swarms of smart drones, with the support of charging technology, can provide completing sensing capabilities in Smart Cities, such as traffic monitoring and disaster response. Existing approaches, including distributed optimization and deep reinforcement learning (DRL), aim to coordinate drones to achieve cost-effective, high-quality navigation, sensing, and recharging. However, they have distinct challenges: short-term optimization struggles to provide sustained benefits, while long-term DRL lacks scalability, resilience, and flexibility. To bridge this gap, this paper introduces a new progressive approach that encompasses the planning and selection based on distributed optimization, as well as DRL-based flying direction scheduling. Extensive experiment with datasets generated from realisitic urban mobility demonstrate the outstanding performance of the proposed solution in traffic monitoring compared to three baseline methods.
Consensus-based Participatory Budgeting for Legitimacy: Decision Support via Multi-agent Reinforcement Learning
Jul 24, 2023



The legitimacy of bottom-up democratic processes for the distribution of public funds by policy-makers is challenging and complex. Participatory budgeting is such a process, where voting outcomes may not always be fair or inclusive. Deliberation for which project ideas to put for voting and choose for implementation lack systematization and do not scale. This paper addresses these grand challenges by introducing a novel and legitimate iterative consensus-based participatory budgeting process. Consensus is designed to be a result of decision support via an innovative multi-agent reinforcement learning approach. Voters are assisted to interact with each other to make viable compromises. Extensive experimental evaluation with real-world participatory budgeting data from Poland reveal striking findings: Consensus is reachable, efficient and robust. Compromise is required, which is though comparable to the one of existing voting aggregation methods that promote fairness and inclusion without though attaining consensus.
* 13 Pages, 8 Figures, 3 Tables, Accepted in International Conference on Machine Learning, Optimization, and Data Science, 2023
Science in the Era of ChatGPT, Large Language Models and AI: Challenges for Research Ethics Review and How to Respond
May 24, 2023
Large language models of artificial intelligence (AI) such as ChatGPT find remarkable but controversial applicability in science and research. This paper reviews epistemological challenges, ethical and integrity risks in science conduct. This is with the aim to lay new timely foundations for a high-quality research ethics review in the era of AI. The role of AI language models as a research instrument and subject is scrutinized along with ethical implications for scientists, participants and reviewers. Ten recommendations shape a response for a more responsible research conduct with AI language models.
Collective Privacy Recovery: Data-sharing Coordination via Decentralized Artificial Intelligence
Jan 15, 2023Collective privacy loss becomes a colossal problem, an emergency for personal freedoms and democracy. But, are we prepared to handle personal data as scarce resource and collectively share data under the doctrine: as little as possible, as much as necessary? We hypothesize a significant privacy recovery if a population of individuals, the data collective, coordinates to share minimum data for running online services with the required quality. Here we show how to automate and scale-up complex collective arrangements for privacy recovery using decentralized artificial intelligence. For this, we compare for first time attitudinal, intrinsic, rewarded and coordinated data sharing in a rigorous living-lab experiment of high realism involving >27,000 data-sharing choices. Using causal inference and cluster analysis, we differentiate criteria predicting privacy and five key data-sharing behaviors. Strikingly, data-sharing coordination proves to be a win-win for all: remarkable privacy recovery for people with evident costs reduction for service providers.