 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeM-SET: Multi-Drone Swarm Intelligence Experimentation with Collision Avoidance Realism
Jun 16, 2024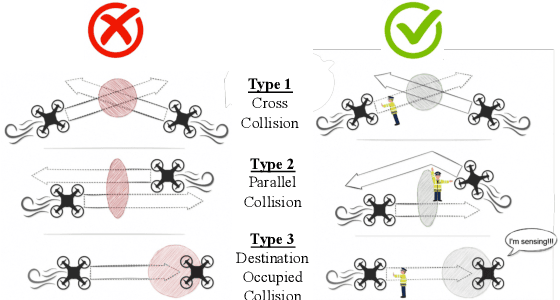
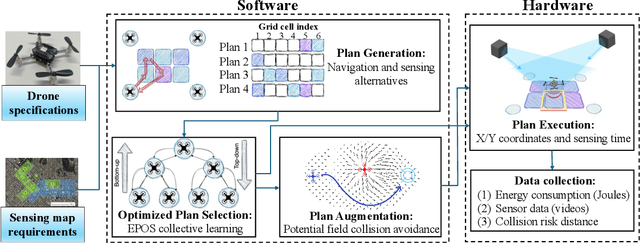
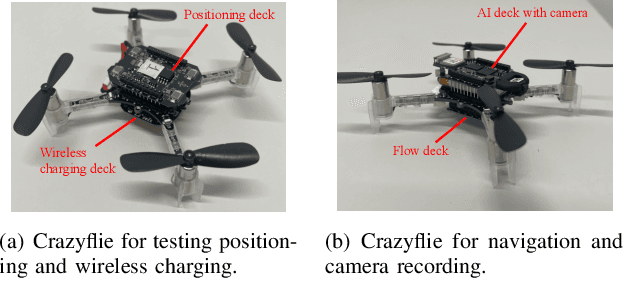
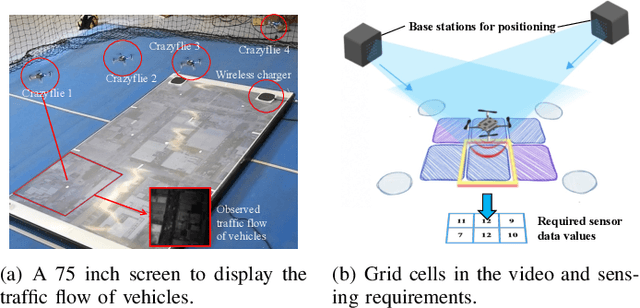
Distributed sensing by cooperative drone swarms is crucial for several Smart City applications, such as traffic monitoring and disaster response. Using an indoor lab with inexpensive drones, a testbed supports complex and ambitious studies on these systems while maintaining low cost, rigor, and external validity. This paper introduces the Multi-drone Sensing Experimentation Testbed (M-SET), a novel platform designed to prototype, develop, test, and evaluate distributed sensing with swarm intelligence. M-SET addresses the limitations of existing testbeds that fail to emulate collisions, thus lacking realism in outdoor environments. By integrating a collision avoidance method based on a potential field algorithm, M-SET ensures collision-free navigation and sensing, further optimized via a multi-agent collective learning algorithm. Extensive evaluation demonstrates accurate energy consumption estimation and a low risk of collisions, providing a robust proof-of-concept. New insights show that M-SET has significant potential to support ambitious research with minimal cost, simplicity, and high sensing quality.
Multi-Agent Team Access Monitoring: Environments that Benefit from Target Information Sharing
Mar 28, 2024



Robotic access monitoring of multiple target areas has applications including checkpoint enforcement, surveillance and containment of fire and flood hazards. Monitoring access for a single target region has been successfully modeled as a minimum-cut problem. We generalize this model to support multiple target areas using two approaches: iterating on individual targets and examining the collections of targets holistically. Through simulation we measure the performance of each approach on different scenarios.