 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCoordinated Multi-Drone Last-mile Delivery: Learning Strategies for Energy-aware and Timely Operations
Sep 19, 2025Drones have recently emerged as a faster, safer, and cost-efficient way for last-mile deliveries of parcels, particularly for urgent medical deliveries highlighted during the pandemic. This paper addresses a new challenge of multi-parcel delivery with a swarm of energy-aware drones, accounting for time-sensitive customer requirements. Each drone plans an optimal multi-parcel route within its battery-restricted flight range to minimize delivery delays and reduce energy consumption. The problem is tackled by decomposing it into three sub-problems: (1) optimizing depot locations and service areas using K-means clustering; (2) determining the optimal flight range for drones through reinforcement learning; and (3) planning and selecting multi-parcel delivery routes via a new optimized plan selection approach. To integrate these solutions and enhance long-term efficiency, we propose a novel algorithm leveraging actor-critic-based multi-agent deep reinforcement learning. Extensive experimentation using realistic delivery datasets demonstrate an exceptional performance of the proposed algorithm. We provide new insights into economic efficiency (minimize energy consumption), rapid operations (reduce delivery delays and overall execution time), and strategic guidance on depot deployment for practical logistics applications.
M-SET: Multi-Drone Swarm Intelligence Experimentation with Collision Avoidance Realism
Jun 16, 2024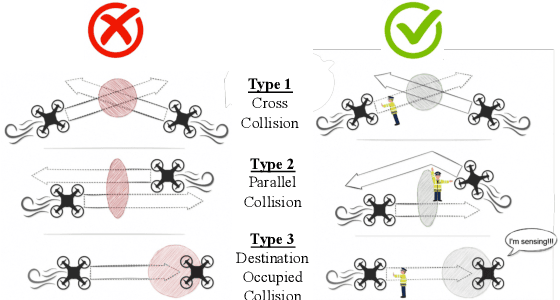
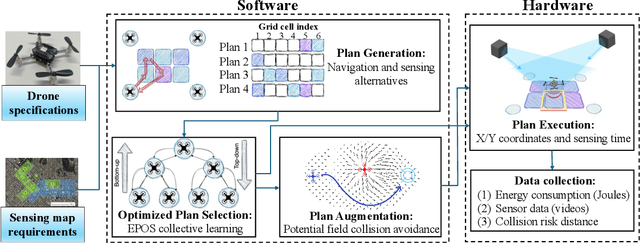
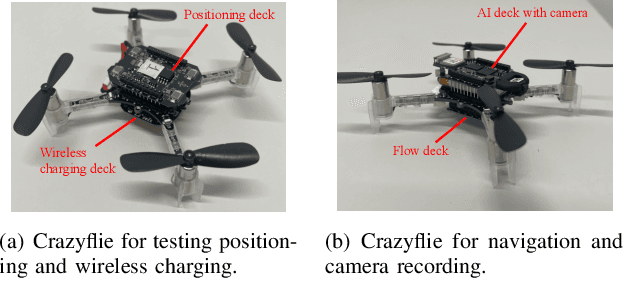
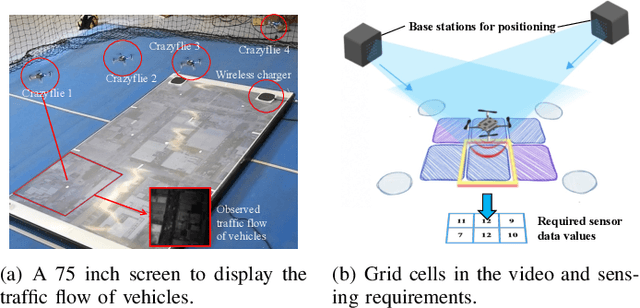
Distributed sensing by cooperative drone swarms is crucial for several Smart City applications, such as traffic monitoring and disaster response. Using an indoor lab with inexpensive drones, a testbed supports complex and ambitious studies on these systems while maintaining low cost, rigor, and external validity. This paper introduces the Multi-drone Sensing Experimentation Testbed (M-SET), a novel platform designed to prototype, develop, test, and evaluate distributed sensing with swarm intelligence. M-SET addresses the limitations of existing testbeds that fail to emulate collisions, thus lacking realism in outdoor environments. By integrating a collision avoidance method based on a potential field algorithm, M-SET ensures collision-free navigation and sensing, further optimized via a multi-agent collective learning algorithm. Extensive evaluation demonstrates accurate energy consumption estimation and a low risk of collisions, providing a robust proof-of-concept. New insights show that M-SET has significant potential to support ambitious research with minimal cost, simplicity, and high sensing quality.
Short vs. Long-term Coordination of Drones: When Distributed Optimization Meets Deep Reinforcement Learning
Nov 16, 2023



Swarms of smart drones, with the support of charging technology, can provide completing sensing capabilities in Smart Cities, such as traffic monitoring and disaster response. Existing approaches, including distributed optimization and deep reinforcement learning (DRL), aim to coordinate drones to achieve cost-effective, high-quality navigation, sensing, and recharging. However, they have distinct challenges: short-term optimization struggles to provide sustained benefits, while long-term DRL lacks scalability, resilience, and flexibility. To bridge this gap, this paper introduces a new progressive approach that encompasses the planning and selection based on distributed optimization, as well as DRL-based flying direction scheduling. Extensive experiment with datasets generated from realisitic urban mobility demonstrate the outstanding performance of the proposed solution in traffic monitoring compared to three baseline methods.
Coordination of Drones at Scale: Decentralized Energy-aware Swarm Intelligence for Spatio-temporal Sensing
Dec 28, 2022Smart City applications, such as traffic monitoring and disaster response, often use swarms of intelligent and cooperative drones to efficiently collect sensor data over different areas of interest and time spans. However, when the required sensing becomes spatio-temporally large and varying, a collective arrangement of sensing tasks to a large number of battery-restricted and distributed drones is challenging. To address this problem, we introduce a scalable and energy-aware model for planning and coordination of spatio-temporal sensing. The coordination model is built upon a decentralized multi-agent collective learning algorithm (EPOS) to ensure scalability, resilience, and flexibility that existing approaches lack of. Experimental results illustrate the outstanding performance of the proposed method compared to state-of-the-art methods. Analytical results contribute a deeper understanding of how coordinated mobility of drones influences sensing performance. This novel coordination solution is applied to traffic monitoring using real-world data to demonstrate a $46.45\%$ more accurate and $2.88\%$ more efficient detection of vehicles as the number of drones become a scarce resource.
3, 2, 1, Drones Go! A Testbed to Take off UAV Swarm Intelligence for Distributed Sensing
Aug 11, 2022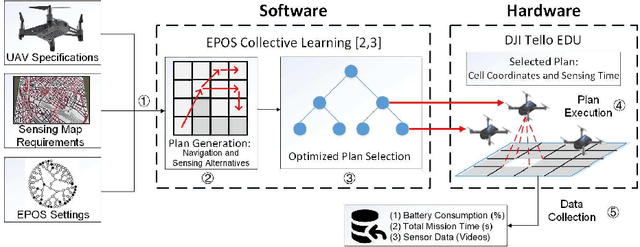
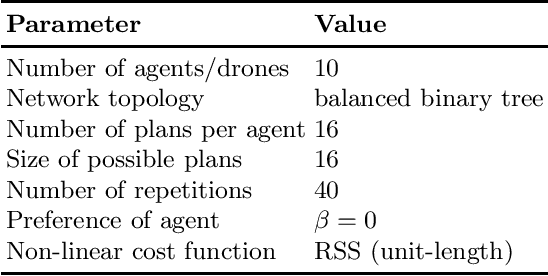
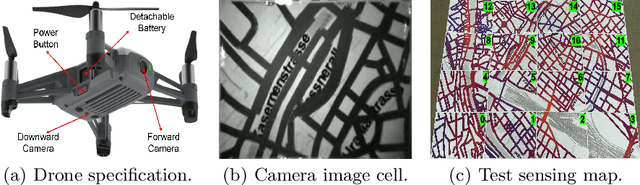
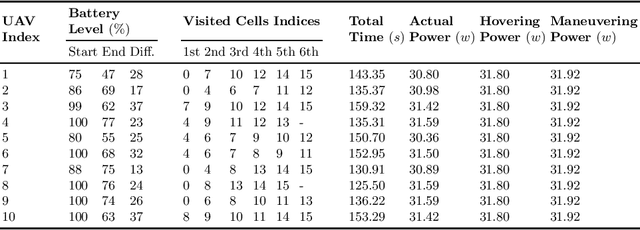
This paper introduces a testbed to study distributed sensing problems of Unmanned Aerial Vehicles (UAVs) exhibiting swarm intelligence. Several Smart City applications, such as transport and disaster response, require efficient collection of sensor data by a swarm of intelligent and cooperative UAVs. This often proves to be too complex and costly to study systematically and rigorously without compromising scale, realism and external validity. With the proposed testbed, this paper sets a stepping stone to emulate, within small laboratory spaces, large sensing areas of interest originated from empirical data and simulation models. Over this sensing map, a swarm of low-cost drones can fly allowing the study of a large spectrum of problems such as energy consumption, charging control, navigation and collision avoidance. The applicability of a decentralized multi-agent collective learning algorithm (EPOS) for UAV swarm intelligence along with the assessment of power consumption measurements provide a proof-of-concept and validate the accuracy of the proposed testbed.