 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge3, 2, 1, Drones Go! A Testbed to Take off UAV Swarm Intelligence for Distributed Sensing
Aug 11, 2022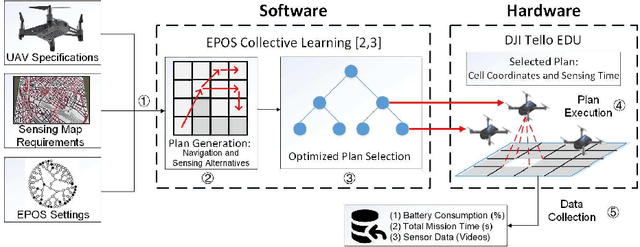
This paper introduces a testbed to study distributed sensing problems of Unmanned Aerial Vehicles (UAVs) exhibiting swarm intelligence. Several Smart City applications, such as transport and disaster response, require efficient collection of sensor data by a swarm of intelligent and cooperative UAVs. This often proves to be too complex and costly to study systematically and rigorously without compromising scale, realism and external validity. With the proposed testbed, this paper sets a stepping stone to emulate, within small laboratory spaces, large sensing areas of interest originated from empirical data and simulation models. Over this sensing map, a swarm of low-cost drones can fly allowing the study of a large spectrum of problems such as energy consumption, charging control, navigation and collision avoidance. The applicability of a decentralized multi-agent collective learning algorithm (EPOS) for UAV swarm intelligence along with the assessment of power consumption measurements provide a proof-of-concept and validate the accuracy of the proposed testbed.