 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReloc3r: Large-Scale Training of Relative Camera Pose Regression for Generalizable, Fast, and Accurate Visual Localization
Dec 11, 2024



Visual localization aims to determine the camera pose of a query image relative to a database of posed images. In recent years, deep neural networks that directly regress camera poses have gained popularity due to their fast inference capabilities. However, existing methods struggle to either generalize well to new scenes or provide accurate camera pose estimates. To address these issues, we present \textbf{Reloc3r}, a simple yet effective visual localization framework. It consists of an elegantly designed relative pose regression network, and a minimalist motion averaging module for absolute pose estimation. Trained on approximately 8 million posed image pairs, Reloc3r achieves surprisingly good performance and generalization ability. We conduct extensive experiments on 6 public datasets, consistently demonstrating the effectiveness and efficiency of the proposed method. It provides high-quality camera pose estimates in real time and generalizes to novel scenes. Code, weights, and data at: \url{https://github.com/ffrivera0/reloc3r}.
SG-NeRF: Neural Surface Reconstruction with Scene Graph Optimization
Jul 17, 2024
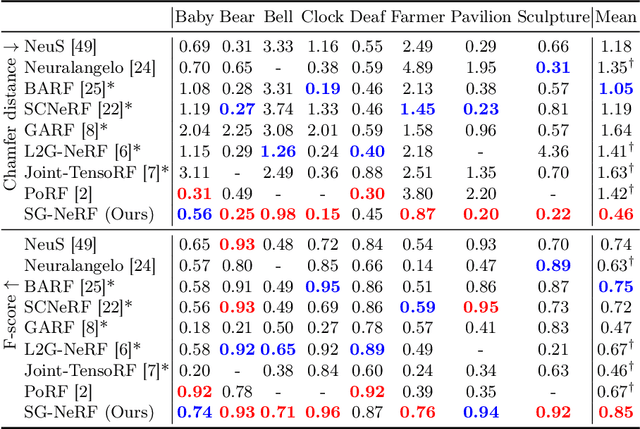


3D surface reconstruction from images is essential for numerous applications. Recently, Neural Radiance Fields (NeRFs) have emerged as a promising framework for 3D modeling. However, NeRFs require accurate camera poses as input, and existing methods struggle to handle significantly noisy pose estimates (i.e., outliers), which are commonly encountered in real-world scenarios. To tackle this challenge, we present a novel approach that optimizes radiance fields with scene graphs to mitigate the influence of outlier poses. Our method incorporates an adaptive inlier-outlier confidence estimation scheme based on scene graphs, emphasizing images of high compatibility with the neighborhood and consistency in the rendering quality. We also introduce an effective intersection-over-union (IoU) loss to optimize the camera pose and surface geometry, together with a coarse-to-fine strategy to facilitate the training. Furthermore, we propose a new dataset containing typical outlier poses for a detailed evaluation. Experimental results on various datasets consistently demonstrate the effectiveness and superiority of our method over existing approaches, showcasing its robustness in handling outliers and producing high-quality 3D reconstructions. Our code and data are available at: \url{https://github.com/Iris-cyy/SG-NeRF}.