 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModel Learning and Contextual Controller Tuning for Autonomous Racing
Oct 06, 2021
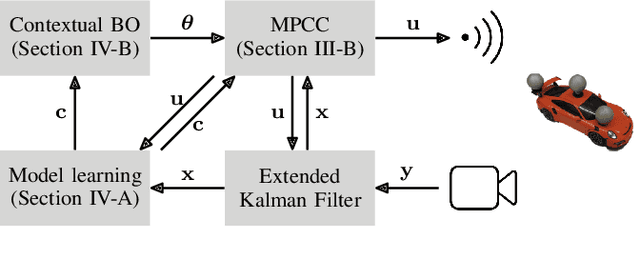
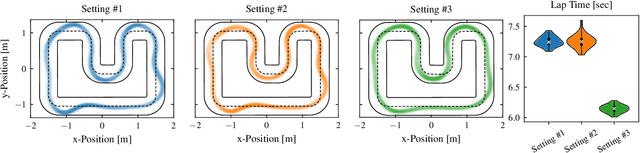
Model predictive control has been widely used in the field of autonomous racing and many data-driven approaches have been proposed to improve the closed-loop performance and to minimize lap time. However, it is often overlooked that a change in the environmental conditions, e.g., when it starts raining, it is not only required to adapt the predictive model but also the controller parameters need to be adjusted. In this paper, we address this challenge with the goal of requiring only few data. The key novelty of the proposed approach is that we leverage the learned dynamics model to encode the environmental condition as context. This insight allows us to employ contextual Bayesian optimization, thus accelerating the controller tuning problem when the environment changes and to transfer knowledge across different cars. The proposed framework is validated on an experimental platform with 1:28 scale RC race cars. We perform an extensive evaluation with more than 2'000 driven laps demonstrating that our approach successfully optimizes the lap time across different contexts faster compared to standard Bayesian optimization.
On Simulation and Trajectory Prediction with Gaussian Process Dynamics
Dec 24, 2019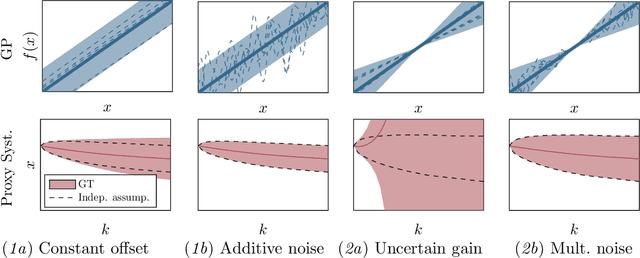
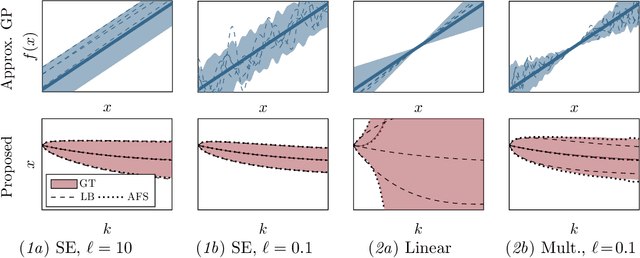
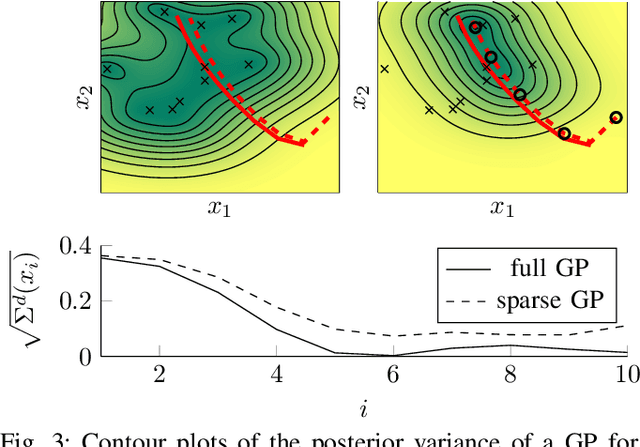
Established techniques for simulation and prediction with Gaussian process (GP) dynamics often implicitly make use of an independence assumption on successive function evaluations of the dynamics model. This can result in significant error and underestimation of the prediction uncertainty, potentially leading to failures in safety-critical applications. This paper discusses methods that explicitly take the correlation of successive function evaluations into account. We first describe two sampling-based techniques; one approach provides samples of the true trajectory distribution, suitable for `ground truth' simulations, while the other draws function samples from basis function approximations of the GP. Second, we propose a linearization-based technique that directly provides approximations of the trajectory distribution, taking correlations explicitly into account. We demonstrate the procedures in simple numerical examples, contrasting the results with established methods.
Cautious NMPC with Gaussian Process Dynamics for Miniature Race Cars
Nov 17, 2017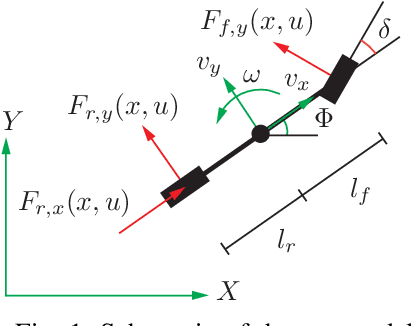
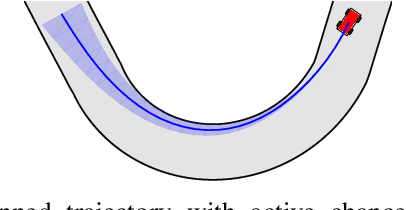
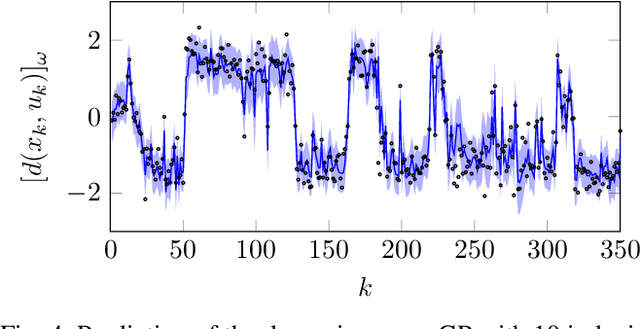
This paper presents an adaptive high performance control method for autonomous miniature race cars. Racing dynamics are notoriously hard to model from first principles, which is addressed by means of a cautious nonlinear model predictive control (NMPC) approach that learns to improve its dynamics model from data and safely increases racing performance. The approach makes use of a Gaussian Process (GP) and takes residual model uncertainty into account through a chance constrained formulation. We present a sparse GP approximation with dynamically adjusting inducing inputs, enabling a real-time implementable controller. The formulation is demonstrated in simulations, which show significant improvement with respect to both lap time and constraint satisfaction compared to an NMPC without model learning.