 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConflict Mitigation in Shared Environments using Flow-Aware Multi-Agent Path Finding
Mar 13, 2026Deploying multi-robot systems in environments shared with dynamic and uncontrollable agents presents significant challenges, especially for large robot fleets. In such environments, individual robot operations can be delayed due to unforeseen conflicts with uncontrollable agents. While existing research primarily focuses on preserving the completeness of Multi-Agent Path Finding (MAPF) solutions considering delays, there is limited emphasis on utilizing additional environmental information to enhance solution quality in the presence of other dynamic agents. To this end, we propose Flow-Aware Multi-Agent Path Finding (FA-MAPF), a novel framework that integrates learned motion patterns of uncontrollable agents into centralized MAPF algorithms. Our evaluation, conducted on a diverse set of benchmark maps with simulated uncontrollable agents and on a real-world map with recorded human trajectories, demonstrates the effectiveness of FA-MAPF compared to state-of-the-art baselines. The experimental results show that FA-MAPF can consistently reduce conflicts with uncontrollable agents, up to 55%, without compromising task efficiency.
Fast Online Learning of CLiFF-maps in Changing Environments
Oct 16, 2024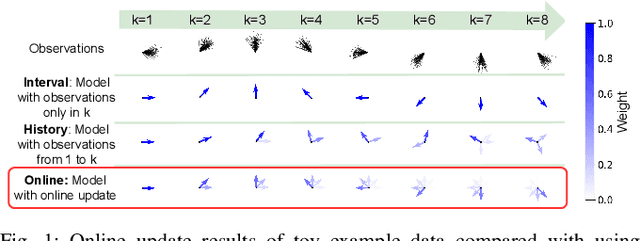
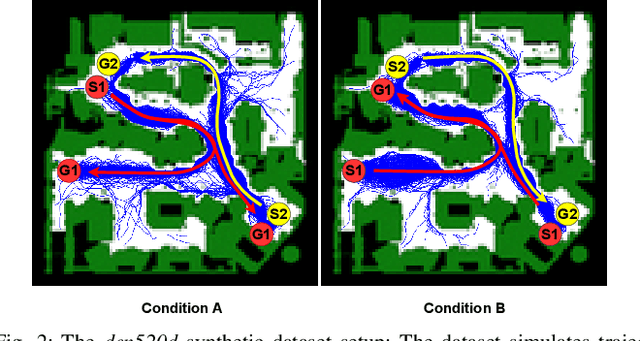
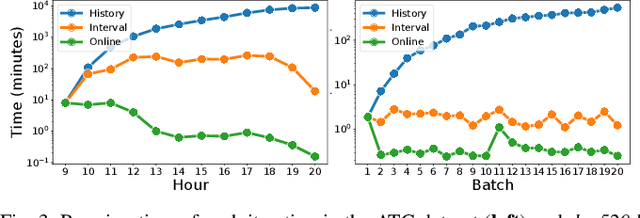

Maps of dynamics are effective representations of motion patterns learned from prior observations, with recent research demonstrating their ability to enhance performance in various downstream tasks such as human-aware robot navigation, long-term human motion prediction, and robot localization. Current advancements have primarily concentrated on methods for learning maps of human flow in environments where the flow is static, i.e., not assumed to change over time. In this paper we propose a method to update the CLiFF-map, one type of map of dynamics, for achieving efficient life-long robot operation. As new observations are collected, our goal is to update a CLiFF-map to effectively and accurately integrate new observations, while retaining relevant historic motion patterns. The proposed online update method maintains a probabilistic representation in each observed location, updating parameters by continuously tracking sufficient statistics. In experiments using both synthetic and real-world datasets, we show that our method is able to maintain accurate representations of human motion dynamics, contributing to high performance flow-compliant planning downstream tasks, while being orders of magnitude faster than the comparable baselines.
Towards Using Fast Embedded Model Predictive Control for Human-Aware Predictive Robot Navigation
May 21, 2024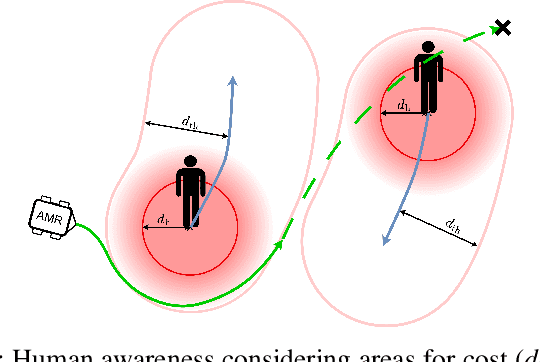
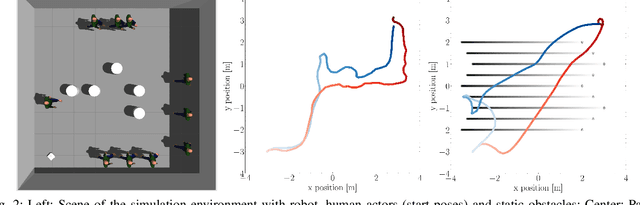
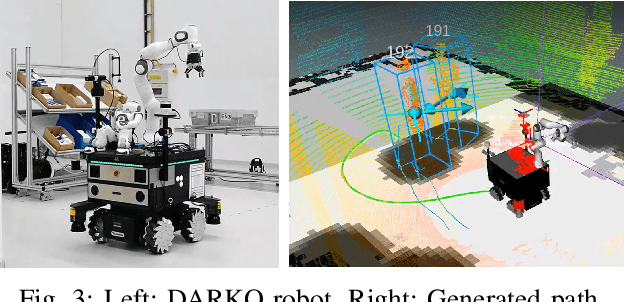
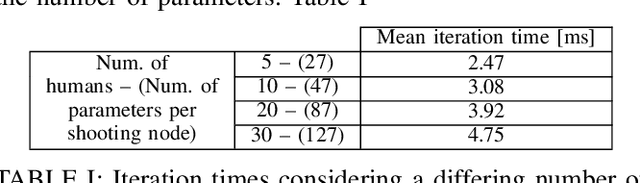
Predictive planning is a key capability for robots to efficiently and safely navigate populated environments. Particularly in densely crowded scenes, with uncertain human motion predictions, predictive path planning, and control can become expensive to compute in real time due to the curse of dimensionality. With the goal of achieving pro-active and legible robot motion in shared environments, in this paper we present HuMAN-MPC, a computationally efficient algorithm for Human Motion Aware Navigation using fast embedded Model Predictive Control. The approach consists of a novel model predictive control (MPC) formulation that leverages a fast state-of-the-art optimization backend based on a sequential quadratic programming real-time iteration scheme while also providing feasibility monitoring. Our experiments, in simulation and on a fully integrated ROS-based platform, show that the approach achieves great scalability with fast computation times without penalizing path quality and efficiency of the resulting avoidance behavior.