 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFast Online Learning of CLiFF-maps in Changing Environments
Paper and Code
Oct 16, 2024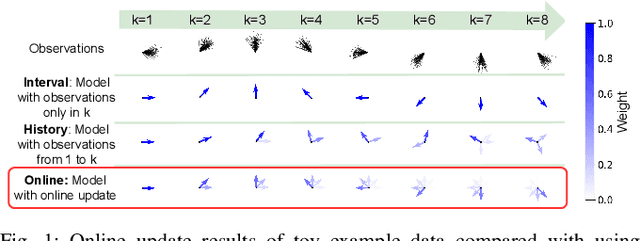
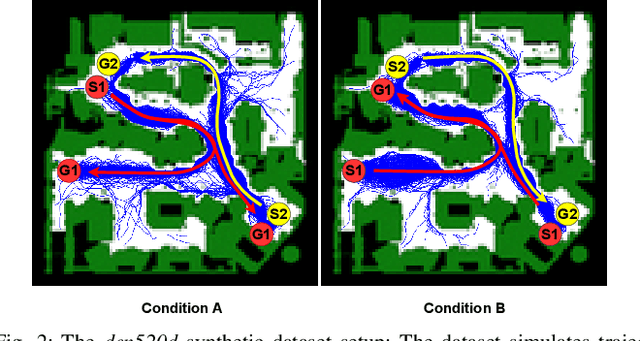
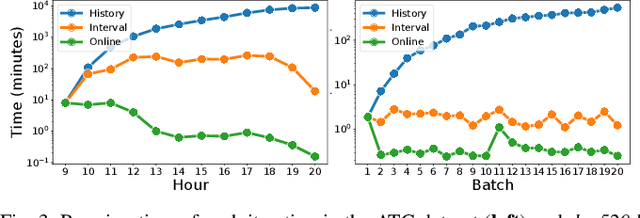

Maps of dynamics are effective representations of motion patterns learned from prior observations, with recent research demonstrating their ability to enhance performance in various downstream tasks such as human-aware robot navigation, long-term human motion prediction, and robot localization. Current advancements have primarily concentrated on methods for learning maps of human flow in environments where the flow is static, i.e., not assumed to change over time. In this paper we propose a method to update the CLiFF-map, one type of map of dynamics, for achieving efficient life-long robot operation. As new observations are collected, our goal is to update a CLiFF-map to effectively and accurately integrate new observations, while retaining relevant historic motion patterns. The proposed online update method maintains a probabilistic representation in each observed location, updating parameters by continuously tracking sufficient statistics. In experiments using both synthetic and real-world datasets, we show that our method is able to maintain accurate representations of human motion dynamics, contributing to high performance flow-compliant planning downstream tasks, while being orders of magnitude faster than the comparable baselines.