 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVolumetric Primitives for Modeling and Rendering Scattering and Emissive Media
May 24, 2024



We propose a volumetric representation based on primitives to model scattering and emissive media. Accurate scene representations enabling efficient rendering are essential for many computer graphics applications. General and unified representations that can handle surface and volume-based representations simultaneously, allowing for physically accurate modeling, remain a research challenge. Inspired by recent methods for scene reconstruction that leverage mixtures of 3D Gaussians to model radiance fields, we formalize and generalize the modeling of scattering and emissive media using mixtures of simple kernel-based volumetric primitives. We introduce closed-form solutions for transmittance and free-flight distance sampling for 3D Gaussian kernels, and propose several optimizations to use our method efficiently within any off-the-shelf volumetric path tracer by leveraging ray tracing for efficiently querying the medium. We demonstrate our method as an alternative to other forms of volume modeling (e.g. voxel grid-based representations) for forward and inverse rendering of scattering media. Furthermore, we adapt our method to the problem of radiance field optimization and rendering, and demonstrate comparable performance to the state of the art, while providing additional flexibility in terms of performance and usability.
Neural inverse procedural modeling of knitting yarns from images
Mar 01, 2023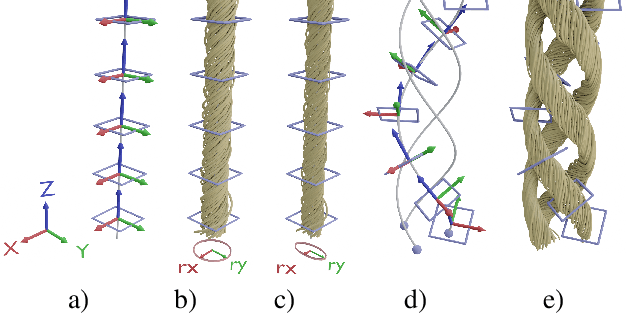
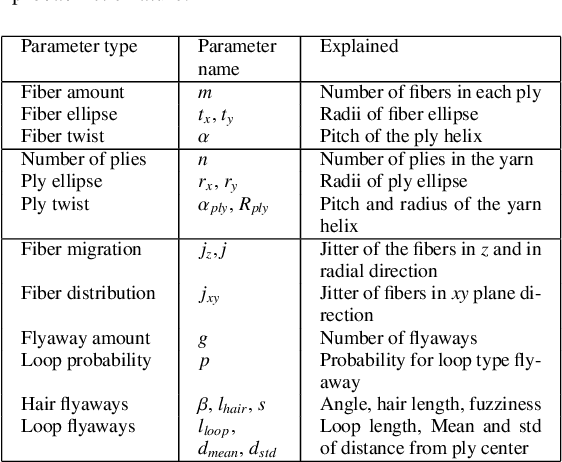
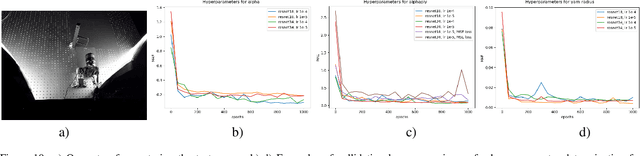

We investigate the capabilities of neural inverse procedural modeling to infer high-quality procedural yarn models with fiber-level details from single images of depicted yarn samples. While directly inferring all parameters of the underlying yarn model based on a single neural network may seem an intuitive choice, we show that the complexity of yarn structures in terms of twisting and migration characteristics of the involved fibers can be better encountered in terms of ensembles of networks that focus on individual characteristics. We analyze the effect of different loss functions including a parameter loss to penalize the deviation of inferred parameters to ground truth annotations, a reconstruction loss to enforce similar statistics of the image generated for the estimated parameters in comparison to training images as well as an additional regularization term to explicitly penalize deviations between latent codes of synthetic images and the average latent code of real images in the latent space of the encoder. We demonstrate that the combination of a carefully designed parametric, procedural yarn model with respective network ensembles as well as loss functions even allows robust parameter inference when solely trained on synthetic data. Since our approach relies on the availability of a yarn database with parameter annotations and we are not aware of such a respectively available dataset, we additionally provide, to the best of our knowledge, the first dataset of yarn images with annotations regarding the respective yarn parameters. For this purpose, we use a novel yarn generator that improves the realism of the produced results over previous approaches.
BoundED: Neural Boundary and Edge Detection in 3D Point Clouds via Local Neighborhood Statistics
Oct 24, 2022



Extracting high-level structural information from 3D point clouds is challenging but essential for tasks like urban planning or autonomous driving requiring an advanced understanding of the scene at hand. Existing approaches are still not able to produce high-quality results consistently while being fast enough to be deployed in scenarios requiring interactivity. We propose to utilize a novel set of features describing the local neighborhood on a per-point basis via first and second order statistics as input for a simple and compact classification network to distinguish between non-edge, sharp-edge, and boundary points in the given data. Leveraging this feature embedding enables our algorithm to outperform the state-of-the-art techniques in terms of quality and processing time.