 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModerating Group Conversation Dynamics with Social Robots
Jul 31, 2024

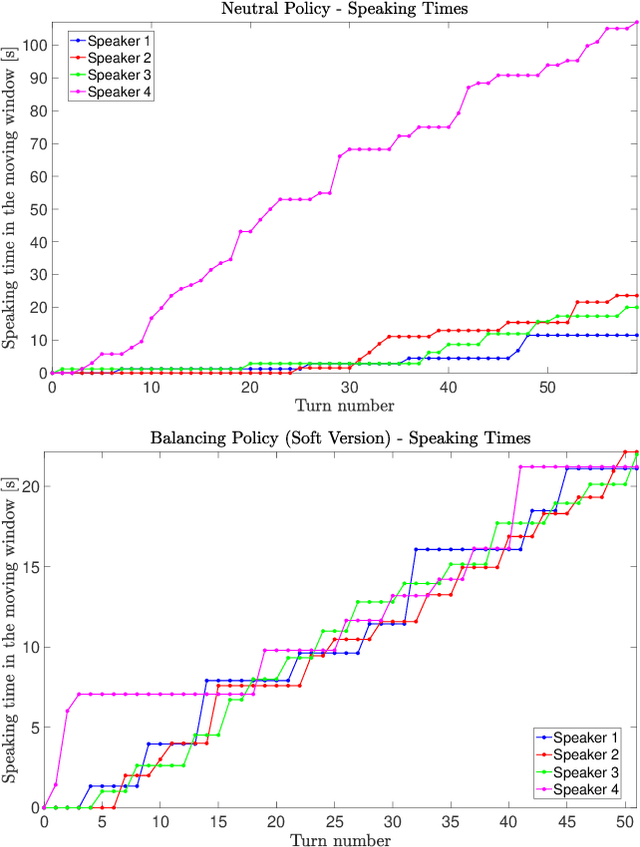

This research investigates the impact of social robot participation in group conversations and assesses the effectiveness of various addressing policies. The study involved 300 participants, divided into groups of four, interacting with a humanoid robot serving as the moderator. The robot utilized conversation data to determine the most appropriate speaker to address. The findings indicate that the robot's addressing policy significantly influenced conversation dynamics, resulting in more balanced attention to each participant and a reduction in subgroup formation.
Enhancing LLM-Based Human-Robot Interaction with Nuances for Diversity Awareness
Jun 25, 2024



This paper presents a system for diversity-aware autonomous conversation leveraging the capabilities of large language models (LLMs). The system adapts to diverse populations and individuals, considering factors like background, personality, age, gender, and culture. The conversation flow is guided by the structure of the system's pre-established knowledge base, while LLMs are tasked with various functions, including generating diversity-aware sentences. Achieving diversity-awareness involves providing carefully crafted prompts to the models, incorporating comprehensive information about users, conversation history, contextual details, and specific guidelines. To assess the system's performance, we conducted both controlled and real-world experiments, measuring a wide range of performance indicators.
Gestural and Touchscreen Interaction for Human-Robot Collaboration: a Comparative Study
Jul 08, 2022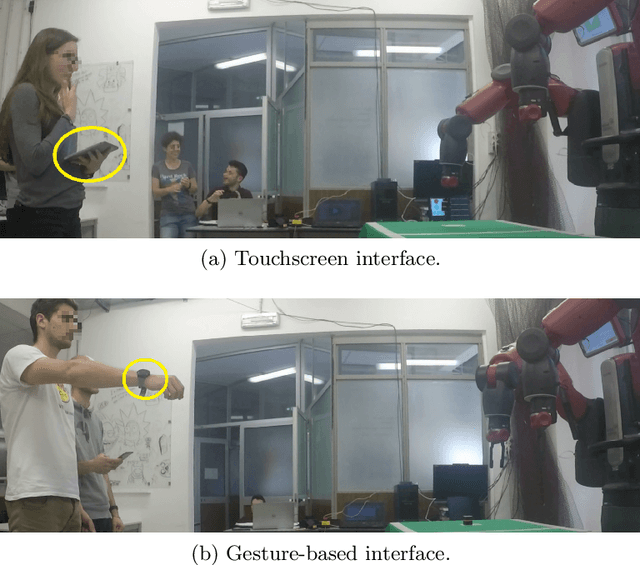
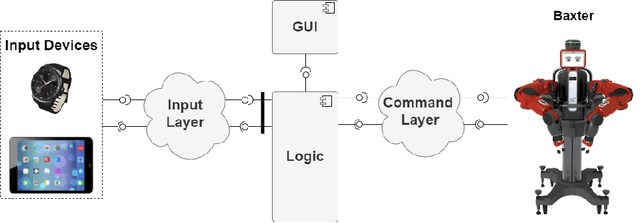
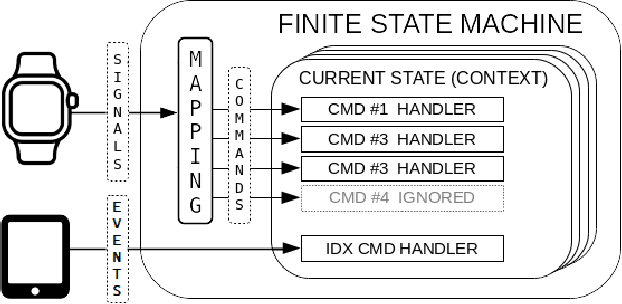
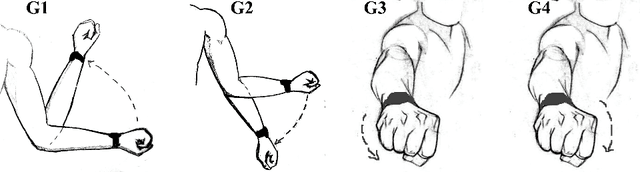
Close human-robot interaction (HRI), especially in industrial scenarios, has been vastly investigated for the advantages of combining human and robot skills. For an effective HRI, the validity of currently available human-machine communication media or tools should be questioned, and new communication modalities should be explored. This article proposes a modular architecture allowing human operators to interact with robots through different modalities. In particular, we implemented the architecture to handle gestural and touchscreen input, respectively, using a smartwatch and a tablet. Finally, we performed a comparative user experience study between these two modalities.
Sustainable Verbal and Non-verbal Human-Robot Interaction Through Cloud Services
Mar 04, 2022
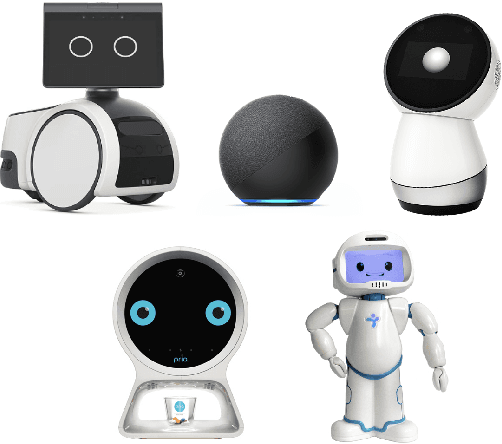


This article presents the design and the implementation of CAIR: a cloud system for knowledge-based autonomous interaction devised for Social Robots and other conversational agents. The system is particularly convenient for low-cost robots and devices. Developers are provided with a sustainable solution to manage verbal and non-verbal interaction through a network connection, with about 3,000 topics of conversation ready for "chit-chatting" and a library of pre-cooked plans that only needs to be grounded into the robot's physical capabilities. The system is structured as a set of REST API endpoints so that it can be easily expanded by adding new APIs to improve the capabilities of the clients connected to the cloud. Another key feature of the system is that it has been designed to make the development of its clients straightforward: in this way, multiple devices can be easily endowed with the capability of autonomously interacting with the user, understanding when to perform specific actions, and exploiting all the information provided by cloud services. The article outlines and discusses the results of the experiments performed to assess the system's performance in terms of response time, paving the way for its use both for research and market solutions. Links to repositories with clients for ROS and popular robots such as Pepper and NAO are given.
Knowledge-Grounded Dialogue Flow Management for Social Robots and Conversational Agents
Aug 04, 2021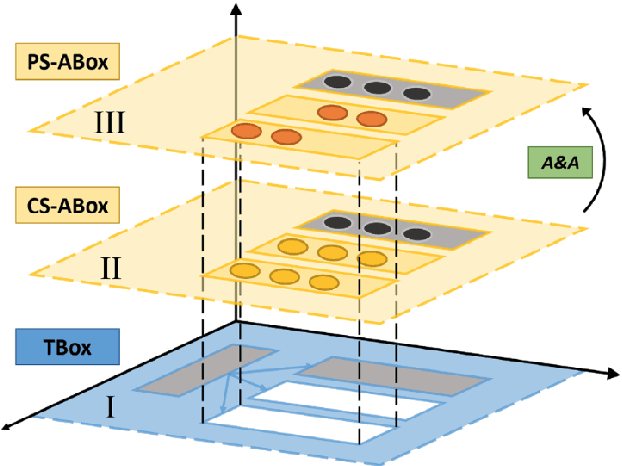

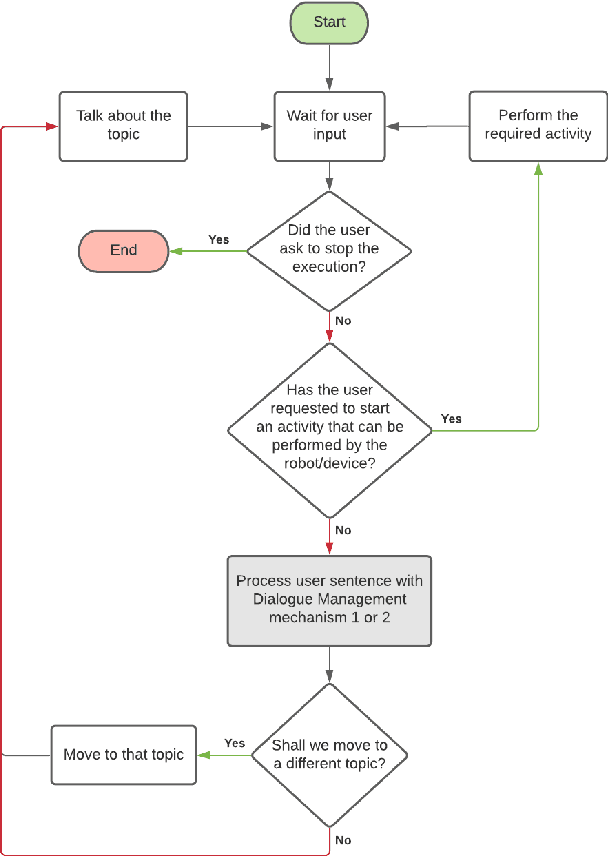
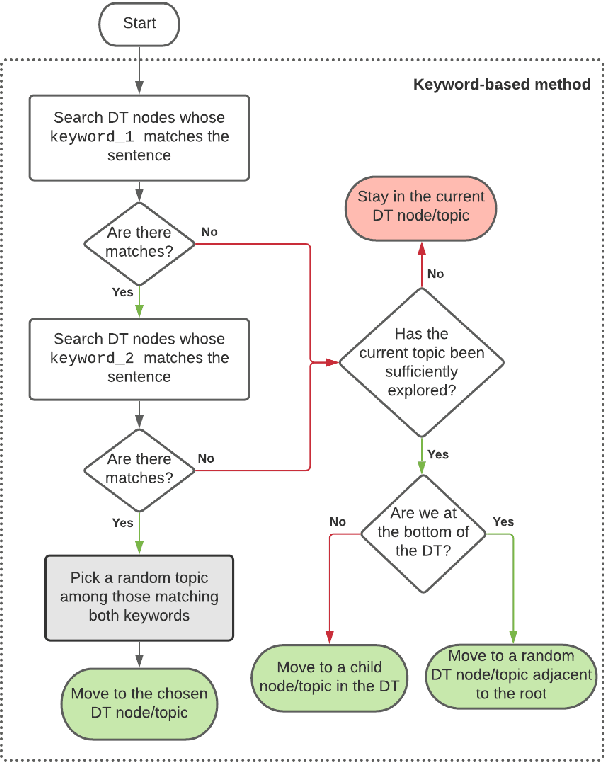
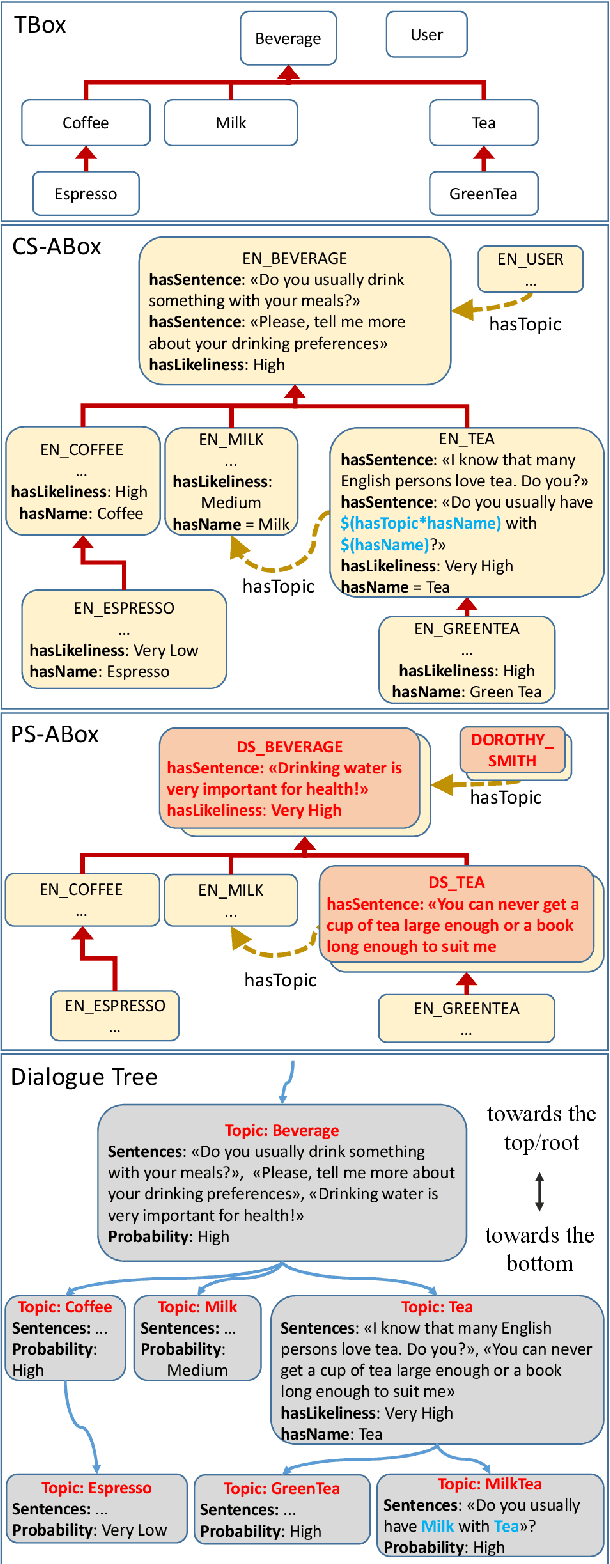
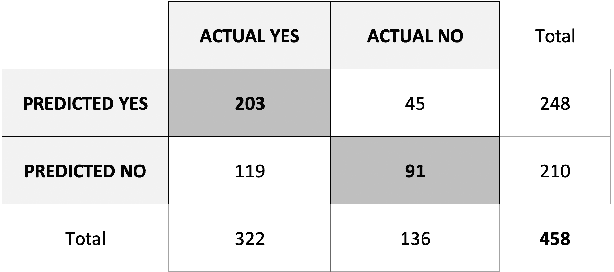
The article proposes a system for knowledge-based conversation designed for Social Robots and other conversational agents. The proposed system relies on an Ontology for the description of all concepts that may be relevant conversation topics, as well as their mutual relationships. The article focuses on the algorithm for Dialogue Management that selects the most appropriate conversation topic depending on the user's input. Moreover, it discusses strategies to ensure a conversation flow that captures, as more coherently as possible, the user's intention to drive the conversation in specific directions while avoiding purely reactive responses to what the user says. To measure the quality of the conversation, the article reports the tests performed with 100 recruited participants, comparing five conversational agents: (i) an agent addressing dialogue flow management based only on the detection of keywords in the speech, (ii) an agent based both on the detection of keywords and the Content Classification feature of Google Cloud Natural Language, (iii) an agent that picks conversation topics randomly, (iv) a human pretending to be a chatbot, and (v) one of the most famous chatbots worldwide: Replika. The subjective perception of the participants is measured both with the SASSI (Subjective Assessment of Speech System Interfaces) tool, as well as with a custom survey for measuring the subjective perception of coherence.
Knowledge Triggering, Extraction and Storage via Human-Robot Verbal Interaction
Apr 22, 2021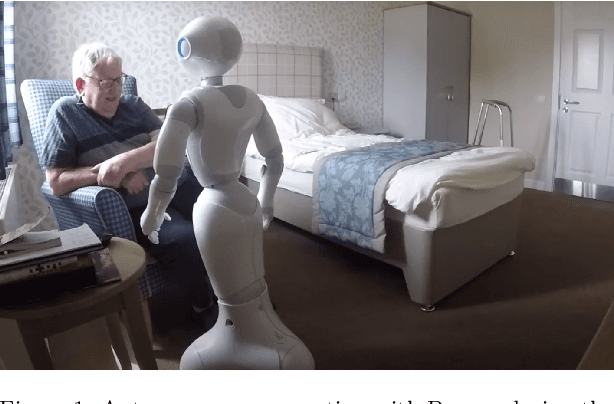
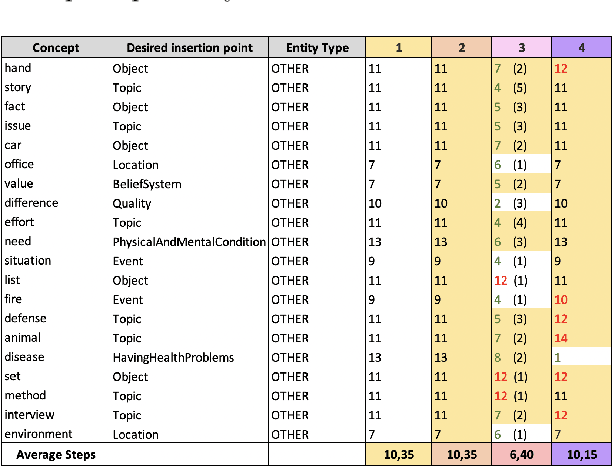
This article describes a novel approach to expand in run-time the knowledge base of an Artificial Conversational Agent. A technique for automatic knowledge extraction from the user's sentence and four methods to insert the new acquired concepts in the knowledge base have been developed and integrated into a system that has already been tested for knowledge-based conversation between a social humanoid robot and residents of care homes. The run-time addition of new knowledge allows overcoming some limitations that affect most robots and chatbots: the incapability of engaging the user for a long time due to the restricted number of conversation topics. The insertion in the knowledge base of new concepts recognized in the user's sentence is expected to result in a wider range of topics that can be covered during an interaction, making the conversation less repetitive. Two experiments are presented to assess the performance of the knowledge extraction technique, and the efficiency of the developed insertion methods when adding several concepts in the Ontology.