 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn the Stability of Gated Graph Neural Networks
May 30, 2023In this paper, we aim to find the conditions for input-state stability (ISS) and incremental input-state stability ($\delta$ISS) of Gated Graph Neural Networks (GGNNs). We show that this recurrent version of Graph Neural Networks (GNNs) can be expressed as a dynamical distributed system and, as a consequence, can be analysed using model-based techniques to assess its stability and robustness properties. Then, the stability criteria found can be exploited as constraints during the training process to enforce the internal stability of the neural network. Two distributed control examples, flocking and multi-robot motion control, show that using these conditions increases the performance and robustness of the gated GNNs.
Gestural and Touchscreen Interaction for Human-Robot Collaboration: a Comparative Study
Jul 08, 2022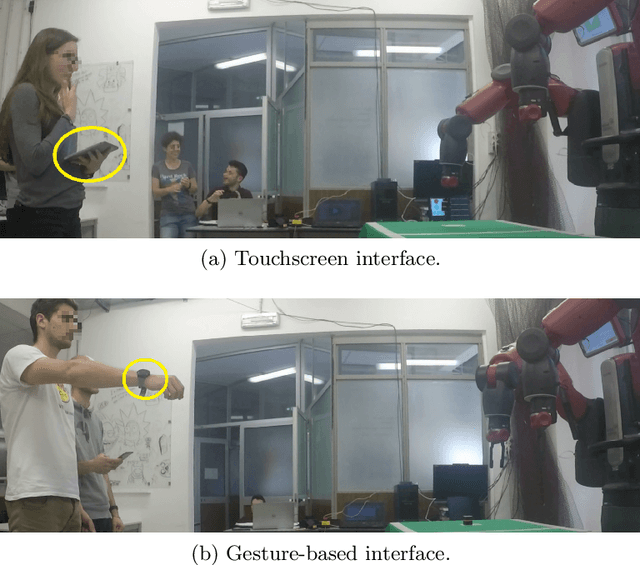
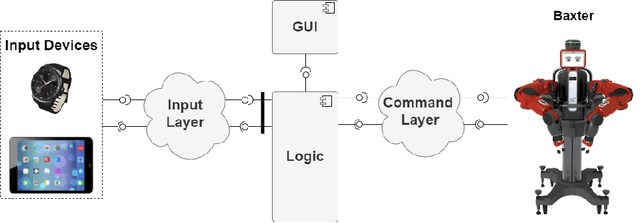
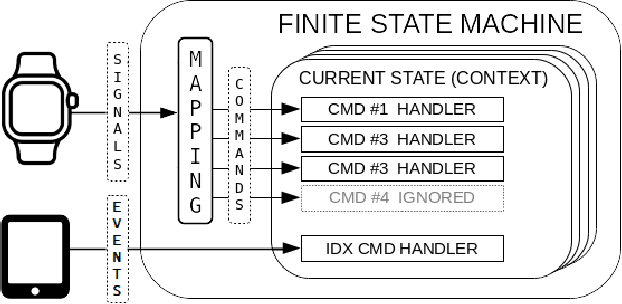
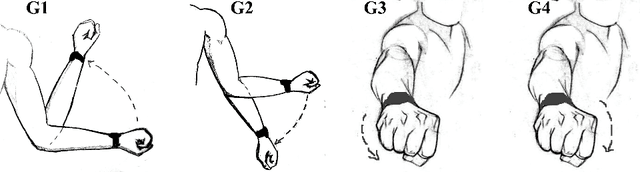
Close human-robot interaction (HRI), especially in industrial scenarios, has been vastly investigated for the advantages of combining human and robot skills. For an effective HRI, the validity of currently available human-machine communication media or tools should be questioned, and new communication modalities should be explored. This article proposes a modular architecture allowing human operators to interact with robots through different modalities. In particular, we implemented the architecture to handle gestural and touchscreen input, respectively, using a smartwatch and a tablet. Finally, we performed a comparative user experience study between these two modalities.