 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Worst-Case Guarantees with Scale-Aware Interpretability
Feb 05, 2026Neural networks organize information according to the hierarchical, multi-scale structure of natural data. Methods to interpret model internals should be similarly scale-aware, explicitly tracking how features compose across resolutions and guaranteeing bounds on the influence of fine-grained structure that is discarded as irrelevant noise. We posit that the renormalisation framework from physics can meet this need by offering technical tools that can overcome limitations of current methods. Moreover, relevant work from adjacent fields has now matured to a point where scattered research threads can be synthesized into practical, theory-informed tools. To combine these threads in an AI safety context, we propose a unifying research agenda -- \emph{scale-aware interpretability} -- to develop formal machinery and interpretability tools that have robustness and faithfulness properties supported by statistical physics.
Exact Learning Dynamics of In-Context Learning in Linear Transformers and Its Application to Non-Linear Transformers
Apr 17, 2025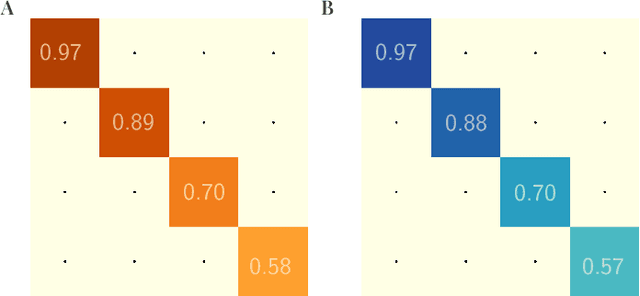
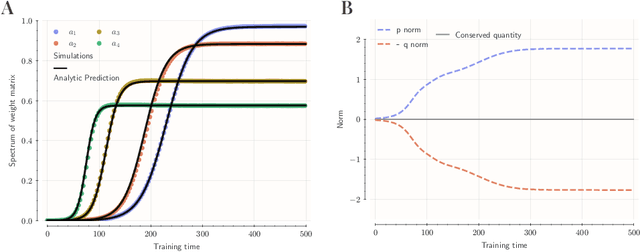
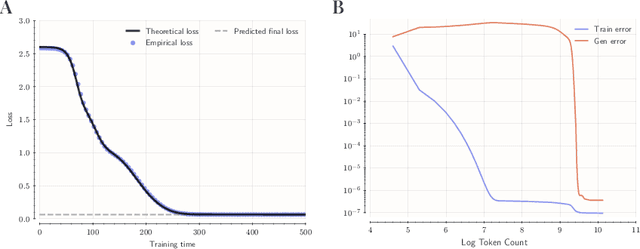
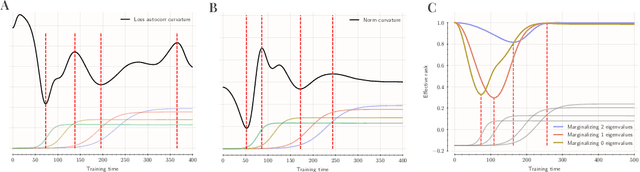
Transformer models exhibit remarkable in-context learning (ICL), adapting to novel tasks from examples within their context, yet the underlying mechanisms remain largely mysterious. Here, we provide an exact analytical characterization of ICL emergence by deriving the closed-form stochastic gradient descent (SGD) dynamics for a simplified linear transformer performing regression tasks. Our analysis reveals key properties: (1) a natural separation of timescales directly governed by the input data's covariance structure, leading to staged learning; (2) an exact description of how ICL develops, including fixed points corresponding to learned algorithms and conservation laws constraining the dynamics; and (3) surprisingly nonlinear learning behavior despite the model's linearity. We hypothesize this phenomenology extends to non-linear models. To test this, we introduce theory-inspired macroscopic measures (spectral rank dynamics, subspace stability) and use them to provide mechanistic explanations for (1) the sudden emergence of ICL in attention-only networks and (2) delayed generalization (grokking) in modular arithmetic models. Our work offers an exact dynamical model for ICL and theoretically grounded tools for analyzing complex transformer training.
Transformers represent belief state geometry in their residual stream
May 24, 2024What computational structure are we building into large language models when we train them on next-token prediction? Here, we present evidence that this structure is given by the meta-dynamics of belief updating over hidden states of the data-generating process. Leveraging the theory of optimal prediction, we anticipate and then find that belief states are linearly represented in the residual stream of transformers, even in cases where the predicted belief state geometry has highly nontrivial fractal structure. We investigate cases where the belief state geometry is represented in the final residual stream or distributed across the residual streams of multiple layers, providing a framework to explain these observations. Furthermore we demonstrate that the inferred belief states contain information about the entire future, beyond the local next-token prediction that the transformers are explicitly trained on. Our work provides a framework connecting the structure of training data to the computational structure and representations that transformers use to carry out their behavior.
Towards Multi-robot Exploration: A Decentralized Strategy for UAV Forest Exploration
Jan 20, 2023



Efficient exploration strategies are vital in tasks such as search-and-rescue missions and disaster surveying. Unmanned Aerial Vehicles (UAVs) have become particularly popular in such applications, promising to cover large areas at high speeds. Moreover, with the increasing maturity of onboard UAV perception, research focus has been shifting toward higher-level reasoning for single- and multi-robot missions. However, autonomous navigation and exploration of previously unknown large spaces still constitutes an open challenge, especially when the environment is cluttered and exhibits large and frequent occlusions due to high obstacle density, as is the case of forests. Moreover, the problem of long-distance wireless communication in such scenes can become a limiting factor, especially when automating the navigation of a UAV swarm. In this spirit, this work proposes an exploration strategy that enables UAVs, both individually and in small swarms, to quickly explore complex scenes in a decentralized fashion. By providing the decision-making capabilities to each UAV to switch between different execution modes, the proposed strategy strikes a great balance between cautious exploration of yet completely unknown regions and more aggressive exploration of smaller areas of unknown space. This results in full coverage of forest areas of variable density, consistently faster than the state of the art. Demonstrating successful deployment with a single UAV as well as a swarm of up to three UAVs, this work sets out the basic principles for multi-root exploration of cluttered scenes, with up to 65% speed up in the single UAV case and 40% increase in explored area for the same mission time in multi-UAV setups.