 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA low-power end-to-end hybrid neuromorphic framework for surveillance applications
Oct 25, 2019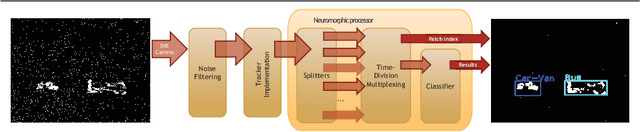

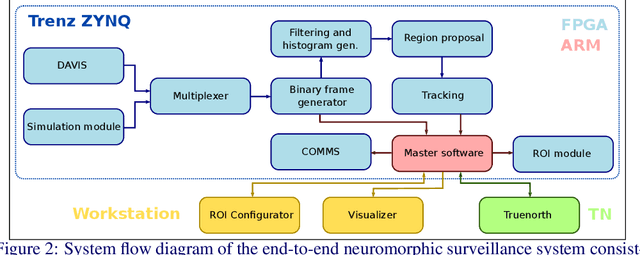

With the success of deep learning, object recognition systems that can be deployed for real-world applications are becoming commonplace. However, inference that needs to largely take place on the `edge' (not processed on servers), is a highly computational and memory intensive workload, making it intractable for low-power mobile nodes and remote security applications. To address this challenge, this paper proposes a low-power (5W) end-to-end neuromorphic framework for object tracking and classification using event-based cameras that possess desirable properties such as low power consumption (5-14 mW) and high dynamic range (120 dB). Nonetheless, unlike traditional approaches of using event-by-event processing, this work uses a mixed frame and event approach to get energy savings with high performance. Using a frame-based region proposal method based on the density of foreground events, a hardware-friendly object tracking is implemented using the apparent object velocity while tackling occlusion scenarios. For low-power classification of the tracked objects, the event camera is interfaced to IBM TrueNorth, which is time-multiplexed to tackle up to eight instances for a traffic monitoring application. The frame-based object track input is converted back to spikes for Truenorth classification via the energy efficient deep network (EEDN) pipeline. Using originally collected datasets, we train the TrueNorth model on the hardware track outputs, instead of using ground truth object locations as commonly done, and demonstrate the efficacy of our system to handle practical surveillance scenarios. Finally, we compare the proposed methodologies to state-of-the-art event-based systems for object tracking and classification, and demonstrate the use case of our neuromorphic approach for low-power applications without sacrificing on performance.
PCA-RECT: An Energy-efficient Object Detection Approach for Event Cameras
Apr 24, 2019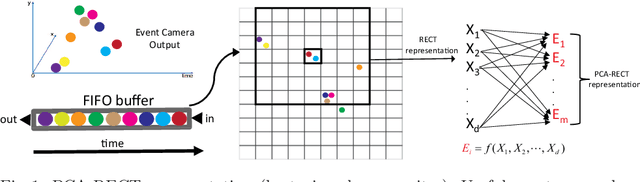
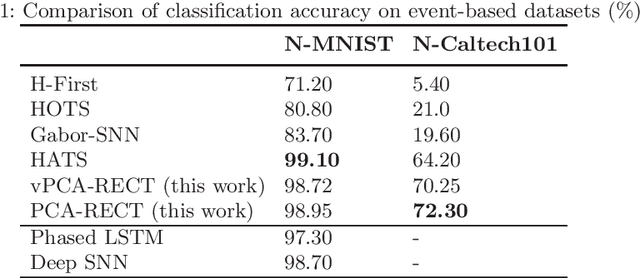
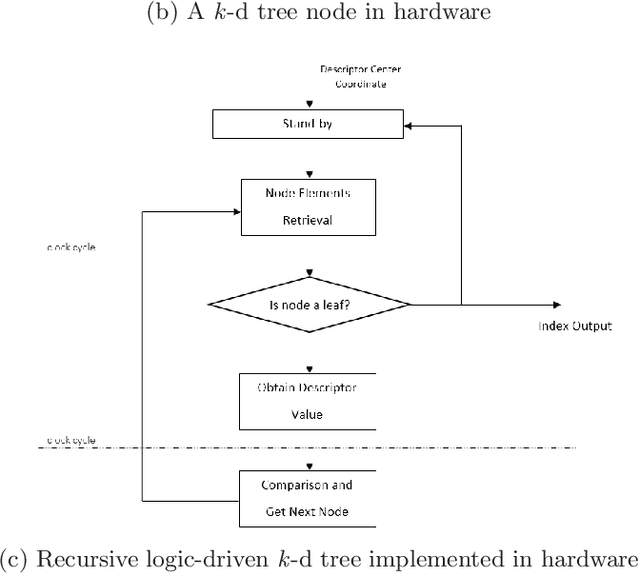
We present the first purely event-based, energy-efficient approach for object detection and categorization using an event camera. Compared to traditional frame-based cameras, choosing event cameras results in high temporal resolution (order of microseconds), low power consumption (few hundred mW) and wide dynamic range (120 dB) as attractive properties. However, event-based object recognition systems are far behind their frame-based counterparts in terms of accuracy. To this end, this paper presents an event-based feature extraction method devised by accumulating local activity across the image frame and then applying principal component analysis (PCA) to the normalized neighborhood region. Subsequently, we propose a backtracking-free k-d tree mechanism for efficient feature matching by taking advantage of the low-dimensionality of the feature representation. Additionally, the proposed k-d tree mechanism allows for feature selection to obtain a lower-dimensional dictionary representation when hardware resources are limited to implement dimensionality reduction. Consequently, the proposed system can be realized on a field-programmable gate array (FPGA) device leading to high performance over resource ratio. The proposed system is tested on real-world event-based datasets for object categorization, showing superior classification performance and relevance to state-of-the-art algorithms. Additionally, we verified the object detection method and real-time FPGA performance in lab settings under non-controlled illumination conditions with limited training data and ground truth annotations.