 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic Scoring with Enhanced Semantics for Training-Free Human-Object Interaction Detection
Jul 23, 2025



Human-Object Interaction (HOI) detection aims to identify humans and objects within images and interpret their interactions. Existing HOI methods rely heavily on large datasets with manual annotations to learn interactions from visual cues. These annotations are labor-intensive to create, prone to inconsistency, and limit scalability to new domains and rare interactions. We argue that recent advances in Vision-Language Models (VLMs) offer untapped potential, particularly in enhancing interaction representation. While prior work has injected such potential and even proposed training-free methods, there remain key gaps. Consequently, we propose a novel training-free HOI detection framework for Dynamic Scoring with enhanced semantics (DYSCO) that effectively utilizes textual and visual interaction representations within a multimodal registry, enabling robust and nuanced interaction understanding. This registry incorporates a small set of visual cues and uses innovative interaction signatures to improve the semantic alignment of verbs, facilitating effective generalization to rare interactions. Additionally, we propose a unique multi-head attention mechanism that adaptively weights the contributions of the visual and textual features. Experimental results demonstrate that our DYSCO surpasses training-free state-of-the-art models and is competitive with training-based approaches, particularly excelling in rare interactions. Code is available at https://github.com/francescotonini/dysco.
AL-GTD: Deep Active Learning for Gaze Target Detection
Sep 27, 2024



Gaze target detection aims at determining the image location where a person is looking. While existing studies have made significant progress in this area by regressing accurate gaze heatmaps, these achievements have largely relied on access to extensive labeled datasets, which demands substantial human labor. In this paper, our goal is to reduce the reliance on the size of labeled training data for gaze target detection. To achieve this, we propose AL-GTD, an innovative approach that integrates supervised and self-supervised losses within a novel sample acquisition function to perform active learning (AL). Additionally, it utilizes pseudo-labeling to mitigate distribution shifts during the training phase. AL-GTD achieves the best of all AUC results by utilizing only 40-50% of the training data, in contrast to state-of-the-art (SOTA) gaze target detectors requiring the entire training dataset to achieve the same performance. Importantly, AL-GTD quickly reaches satisfactory performance with 10-20% of the training data, showing the effectiveness of our acquisition function, which is able to acquire the most informative samples. We provide a comprehensive experimental analysis by adapting several AL methods for the task. AL-GTD outperforms AL competitors, simultaneously exhibiting superior performance compared to SOTA gaze target detectors when all are trained within a low-data regime. Code is available at https://github.com/francescotonini/al-gtd.
Lost and Found: Overcoming Detector Failures in Online Multi-Object Tracking
Jul 16, 2024Multi-object tracking (MOT) endeavors to precisely estimate the positions and identities of multiple objects over time. The prevailing approach, tracking-by-detection (TbD), first detects objects and then links detections, resulting in a simple yet effective method. However, contemporary detectors may occasionally miss some objects in certain frames, causing trackers to cease tracking prematurely. To tackle this issue, we propose BUSCA, meaning `to search', a versatile framework compatible with any online TbD system, enhancing its ability to persistently track those objects missed by the detector, primarily due to occlusions. Remarkably, this is accomplished without modifying past tracking results or accessing future frames, i.e., in a fully online manner. BUSCA generates proposals based on neighboring tracks, motion, and learned tokens. Utilizing a decision Transformer that integrates multimodal visual and spatiotemporal information, it addresses the object-proposal association as a multi-choice question-answering task. BUSCA is trained independently of the underlying tracker, solely on synthetic data, without requiring fine-tuning. Through BUSCA, we showcase consistent performance enhancements across five different trackers and establish a new state-of-the-art baseline across three different benchmarks. Code available at: https://github.com/lorenzovaquero/BUSCA.
Depth Estimation and Image Restoration by Deep Learning from Defocused Images
Feb 21, 2023



Monocular depth estimation and image deblurring are two fundamental tasks in computer vision, given their crucial role in understanding 3D scenes. Performing any of them by relying on a single image is an ill-posed problem. The recent advances in the field of deep convolutional neural networks (DNNs) have revolutionized many tasks in computer vision, including depth estimation and image deblurring. When it comes to using defocused images, the depth estimation and the recovery of the All-in-Focus (Aif) image become related problems due to defocus physics. In spite of this, most of the existing models treat them separately. There are, however, recent models that solve these problems simultaneously by concatenating two networks in a sequence to first estimate the depth or defocus map and then reconstruct the focused image based on it. We propose a DNN that solves the depth estimation and image deblurring in parallel. Our Two-headed Depth Estimation and Deblurring Network (2HDED:NET) extends a conventional Depth from Defocus (DFD) network with a deblurring branch that shares the same encoder as the depth branch. The proposed method has been successfully tested on two benchmarks, one for indoor and the other for outdoor scenes: NYU-v2 and Make3D. Extensive experiments with 2HDED:NET on these benchmarks have demonstrated superior or close performances to those of the state-of-the-art models for depth estimation and image deblurring.
Real-Time Siamese Multiple Object Tracker with Enhanced Proposals
Feb 10, 2022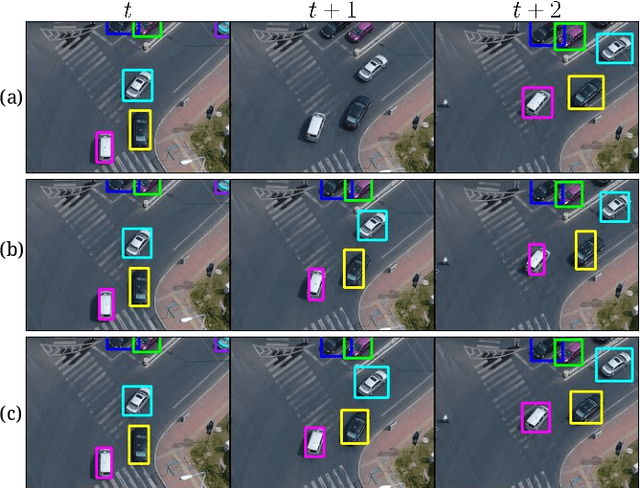
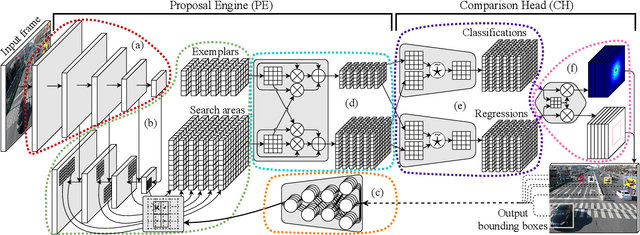

Maintaining the identity of multiple objects in real-time video is a challenging task, as it is not always possible to run a detector on every frame. Thus, motion estimation systems are often employed, which either do not scale well with the number of targets or produce features with limited semantic information. To solve the aforementioned problems and allow the tracking of dozens of arbitrary objects in real-time, we propose SiamMOTION. SiamMOTION includes a novel proposal engine that produces quality features through an attention mechanism and a region-of-interest extractor fed by an inertia module and powered by a feature pyramid network. Finally, the extracted tensors enter a comparison head that efficiently matches pairs of exemplars and search areas, generating quality predictions via a pairwise depthwise region proposal network and a multi-object penalization module. SiamMOTION has been validated on five public benchmarks, achieving leading performance against current state-of-the-art trackers.