 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRectified Point Flow: Generic Point Cloud Pose Estimation
Jun 05, 2025
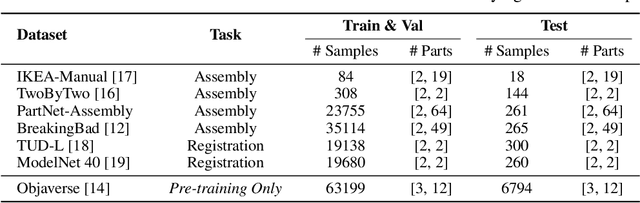
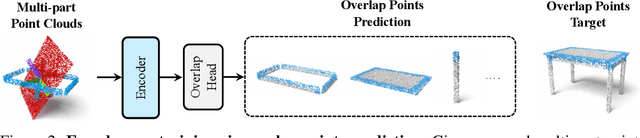
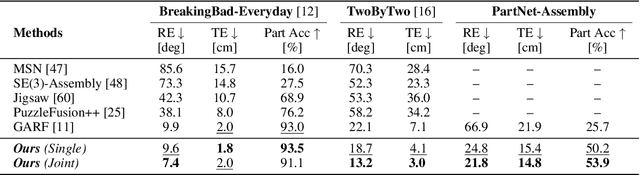
We introduce Rectified Point Flow, a unified parameterization that formulates pairwise point cloud registration and multi-part shape assembly as a single conditional generative problem. Given unposed point clouds, our method learns a continuous point-wise velocity field that transports noisy points toward their target positions, from which part poses are recovered. In contrast to prior work that regresses part-wise poses with ad-hoc symmetry handling, our method intrinsically learns assembly symmetries without symmetry labels. Together with a self-supervised encoder focused on overlapping points, our method achieves a new state-of-the-art performance on six benchmarks spanning pairwise registration and shape assembly. Notably, our unified formulation enables effective joint training on diverse datasets, facilitating the learning of shared geometric priors and consequently boosting accuracy. Project page: https://rectified-pointflow.github.io/.
LoopSplat: Loop Closure by Registering 3D Gaussian Splats
Aug 20, 2024



Simultaneous Localization and Mapping (SLAM) based on 3D Gaussian Splats (3DGS) has recently shown promise towards more accurate, dense 3D scene maps. However, existing 3DGS-based methods fail to address the global consistency of the scene via loop closure and/or global bundle adjustment. To this end, we propose LoopSplat, which takes RGB-D images as input and performs dense mapping with 3DGS submaps and frame-to-model tracking. LoopSplat triggers loop closure online and computes relative loop edge constraints between submaps directly via 3DGS registration, leading to improvements in efficiency and accuracy over traditional global-to-local point cloud registration. It uses a robust pose graph optimization formulation and rigidly aligns the submaps to achieve global consistency. Evaluation on the synthetic Replica and real-world TUM-RGBD, ScanNet, and ScanNet++ datasets demonstrates competitive or superior tracking, mapping, and rendering compared to existing methods for dense RGB-D SLAM. Code is available at loopsplat.github.io.
Living Scenes: Multi-object Relocalization and Reconstruction in Changing 3D Environments
Dec 14, 2023



Research into dynamic 3D scene understanding has primarily focused on short-term change tracking from dense observations, while little attention has been paid to long-term changes with sparse observations. We address this gap with MoRE, a novel approach for multi-object relocalization and reconstruction in evolving environments. We view these environments as "living scenes" and consider the problem of transforming scans taken at different points in time into a 3D reconstruction of the object instances, whose accuracy and completeness increase over time. At the core of our method lies an SE(3)-equivariant representation in a single encoder-decoder network, trained on synthetic data. This representation enables us to seamlessly tackle instance matching, registration, and reconstruction. We also introduce a joint optimization algorithm that facilitates the accumulation of point clouds originating from the same instance across multiple scans taken at different points in time. We validate our method on synthetic and real-world data and demonstrate state-of-the-art performance in both end-to-end performance and individual subtasks.
DEFLOW: Self-supervised 3D Motion Estimation of Debris Flow
Apr 05, 2023Existing work on scene flow estimation focuses on autonomous driving and mobile robotics, while automated solutions are lacking for motion in nature, such as that exhibited by debris flows. We propose DEFLOW, a model for 3D motion estimation of debris flows, together with a newly captured dataset. We adopt a novel multi-level sensor fusion architecture and self-supervision to incorporate the inductive biases of the scene. We further adopt a multi-frame temporal processing module to enable flow speed estimation over time. Our model achieves state-of-the-art optical flow and depth estimation on our dataset, and fully automates the motion estimation for debris flows. The source code and dataset are available at project page.