 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTrajMamba: An Ego-Motion-Guided Mamba Model for Pedestrian Trajectory Prediction from an Egocentric Perspective
Mar 16, 2026Future trajectory prediction of a tracked pedestrian from an egocentric perspective is a key task in areas such as autonomous driving and robot navigation. The challenge of this task lies in the complex dynamic relative motion between the ego-camera and the tracked pedestrian. To address this challenge, we propose an ego-motion-guided trajectory prediction network based on the Mamba model. Firstly, two Mamba models are used as encoders to extract pedestrian motion and ego-motion features from pedestrian movement and ego-vehicle movement, respectively. Then, an ego-motion guided Mamba decoder that explicitly models the relative motion between the pedestrian and the vehicle by integrating pedestrian motion features as historical context with ego-motion features as guiding cues to capture decoded features. Finally, the future trajectory is generated from the decoded features corresponding to the future timestamps. Extensive experiments demonstrate the effectiveness of the proposed model, which achieves state-of-the-art performance on the PIE and JAAD datasets.
Multi-Center Study on Deep Learning-Assisted Detection and Classification of Fetal Central Nervous System Anomalies Using Ultrasound Imaging
Jan 01, 2025



Prenatal ultrasound evaluates fetal growth and detects congenital abnormalities during pregnancy, but the examination of ultrasound images by radiologists requires expertise and sophisticated equipment, which would otherwise fail to improve the rate of identifying specific types of fetal central nervous system (CNS) abnormalities and result in unnecessary patient examinations. We construct a deep learning model to improve the overall accuracy of the diagnosis of fetal cranial anomalies to aid prenatal diagnosis. In our collected multi-center dataset of fetal craniocerebral anomalies covering four typical anomalies of the fetal central nervous system (CNS): anencephaly, encephalocele (including meningocele), holoprosencephaly, and rachischisis, patient-level prediction accuracy reaches 94.5%, with an AUROC value of 99.3%. In the subgroup analyzes, our model is applicable to the entire gestational period, with good identification of fetal anomaly types for any gestational period. Heatmaps superimposed on the ultrasound images not only provide a visual interpretation for the algorithm but also provide an intuitive visual aid to the physician by highlighting key areas that need to be reviewed, helping the physician to quickly identify and validate key areas. Finally, the retrospective reader study demonstrates that by combining the automatic prediction of the DL system with the professional judgment of the radiologist, the diagnostic accuracy and efficiency can be effectively improved and the misdiagnosis rate can be reduced, which has an important clinical application prospect.
Advancing Architectural Floorplan Design with Geometry-enhanced Graph Diffusion
Aug 29, 2024



Automating architectural floorplan design is vital for housing and interior design, offering a faster, cost-effective alternative to manual sketches by architects. However, existing methods, including rule-based and learning-based approaches, face challenges in design complexity and constrained generation with extensive post-processing, and tend to obvious geometric inconsistencies such as misalignment, overlap, and gaps. In this work, we propose a novel generative framework for vector floorplan design via structural graph generation, called GSDiff, focusing on wall junction generation and wall segment prediction to capture both geometric and semantic aspects of structural graphs. To improve the geometric rationality of generated structural graphs, we propose two innovative geometry enhancement methods. In wall junction generation, we propose a novel alignment loss function to improve geometric consistency. In wall segment prediction, we propose a random self-supervision method to enhance the model's perception of the overall geometric structure, thereby promoting the generation of reasonable geometric structures. Employing the diffusion model and the Transformer model, as well as the geometry enhancement strategies, our framework can generate wall junctions, wall segments and room polygons with structural and semantic information, resulting in structural graphs that accurately represent floorplans. Extensive experiments show that the proposed method surpasses existing techniques, enabling free generation and constrained generation, marking a shift towards structure generation in architectural design.
SRA-LSTM: Social Relationship Attention LSTM for Human Trajectory Prediction
Mar 31, 2021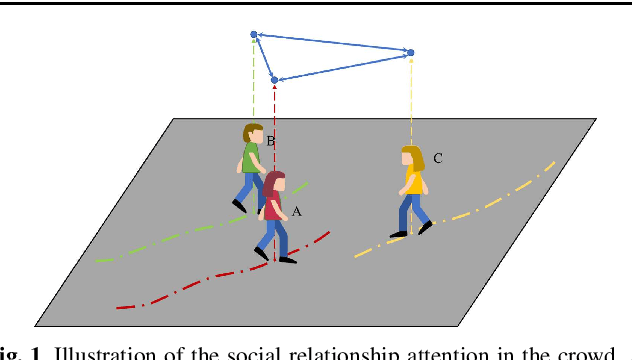
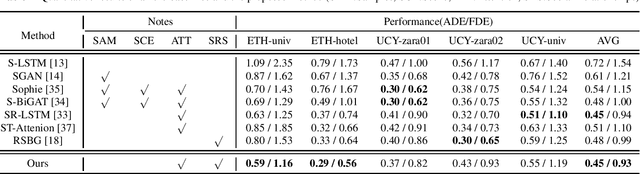

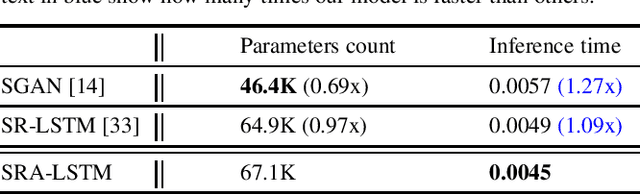
Pedestrian trajectory prediction for surveillance video is one of the important research topics in the field of computer vision and a key technology of intelligent surveillance systems. Social relationship among pedestrians is a key factor influencing pedestrian walking patterns but was mostly ignored in the literature. Pedestrians with different social relationships play different roles in the motion decision of target pedestrian. Motivated by this idea, we propose a Social Relationship Attention LSTM (SRA-LSTM) model to predict future trajectories. We design a social relationship encoder to obtain the representation of their social relationship through the relative position between each pair of pedestrians. Afterwards, the social relationship feature and latent movements are adopted to acquire the social relationship attention of this pair of pedestrians. Social interaction modeling is achieved by utilizing social relationship attention to aggregate movement information from neighbor pedestrians. Experimental results on two public walking pedestrian video datasets (ETH and UCY), our model achieves superior performance compared with state-of-the-art methods. Contrast experiments with other attention methods also demonstrate the effectiveness of social relationship attention.