 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEVNet: An Explainable Deep Network for Dimension Reduction
Nov 21, 2022



Dimension reduction (DR) is commonly utilized to capture the intrinsic structure and transform high-dimensional data into low-dimensional space while retaining meaningful properties of the original data. It is used in various applications, such as image recognition, single-cell sequencing analysis, and biomarker discovery. However, contemporary parametric-free and parametric DR techniques suffer from several significant shortcomings, such as the inability to preserve global and local features and the pool generalization performance. On the other hand, regarding explainability, it is crucial to comprehend the embedding process, especially the contribution of each part to the embedding process, while understanding how each feature affects the embedding results that identify critical components and help diagnose the embedding process. To address these problems, we have developed a deep neural network method called EVNet, which provides not only excellent performance in structural maintainability but also explainability to the DR therein. EVNet starts with data augmentation and a manifold-based loss function to improve embedding performance. The explanation is based on saliency maps and aims to examine the trained EVNet parameters and contributions of components during the embedding process. The proposed techniques are integrated with a visual interface to help the user to adjust EVNet to achieve better DR performance and explainability. The interactive visual interface makes it easier to illustrate the data features, compare different DR techniques, and investigate DR. An in-depth experimental comparison shows that EVNet consistently outperforms the state-of-the-art methods in both performance measures and explainability.
Machine Learning for Predictive Deployment of UAVs with Multiple Access
Mar 02, 2020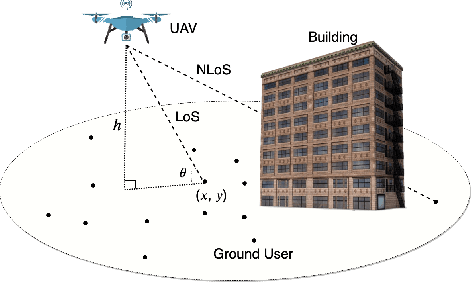
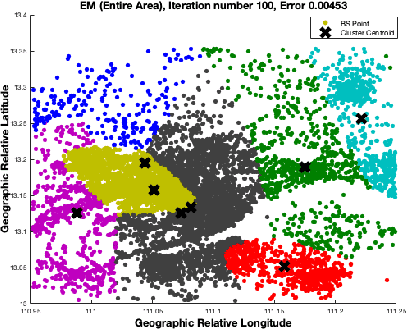
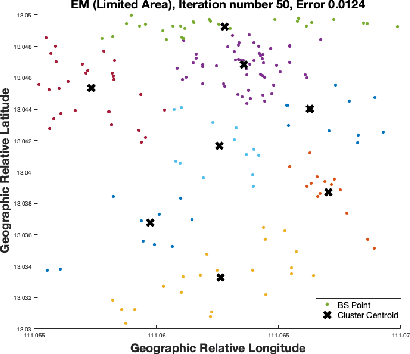
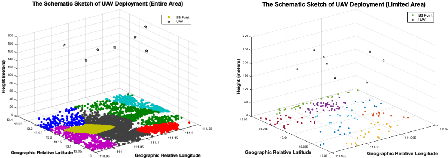
In this paper, a machine learning based deployment framework of unmanned aerial vehicles (UAVs) is studied. In the considered model, UAVs are deployed as flying base stations (BS) to offload heavy traffic from ground BSs. Due to time-varying traffic distribution, a long short-term memory (LSTM) based prediction algorithm is introduced to predict the future cellular traffic. To predict the user service distribution, a KEG algorithm, which is a joint K-means and expectation maximization (EM) algorithm based on Gaussian mixture model (GMM), is proposed for determining the service area of each UAV. Based on the predicted traffic, the optimal UAV positions are derived and three multi-access techniques are compared so as to minimize the total transmit power. Simulation results show that the proposed method can reduce up to 24\% of the total power consumption compared to the conventional method without traffic prediction. Besides, rate splitting multiple access (RSMA) has the lower required transmit power compared to frequency domain multiple access (FDMA) and time domain multiple access (TDMA).