 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMR-ULINS: A Tightly-Coupled UWB-LiDAR-Inertial Estimator with Multi-Epoch Outlier Rejection
Aug 11, 2024



The LiDAR-inertial odometry (LIO) and the ultra-wideband (UWB) have been integrated together to achieve driftless positioning in global navigation satellite system (GNSS)-denied environments. However, the UWB may be affected by systematic range errors (such as the clock drift and the antenna phase center offset) and non-line-of-sight (NLOS) signals, resulting in reduced robustness. In this study, we propose a UWB-LiDAR-inertial estimator (MR-ULINS) that tightly integrates the UWB range, LiDAR frame-to-frame, and IMU measurements within the multi-state constraint Kalman filter (MSCKF) framework. The systematic range errors are precisely modeled to be estimated and compensated online. Besides, we propose a multi-epoch outlier rejection algorithm for UWB NLOS by utilizing the relative accuracy of the LIO. Specifically, the relative trajectory of the LIO is employed to verify the consistency of all range measurements within the sliding window. Extensive experiment results demonstrate that MR-ULINS achieves a positioning accuracy of around 0.1 m in complex indoor environments with severe NLOS interference. Ablation experiments show that the online estimation and multi-epoch outlier rejection can effectively improve the positioning accuracy. Besides, MR-ULINS maintains high accuracy and robustness in LiDAR-degenerated scenes and UWB-challenging conditions with spare base stations.
MSC-LIO: An MSCKF-Based LiDAR-Inertial Odometry with Same-Plane-Point Tracking
Jul 10, 2024
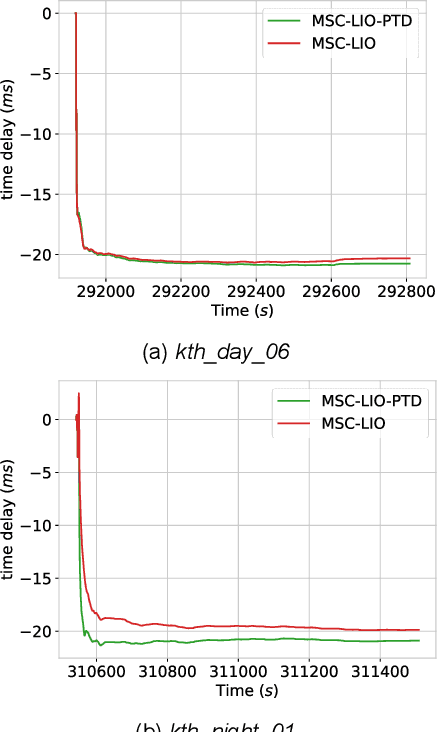

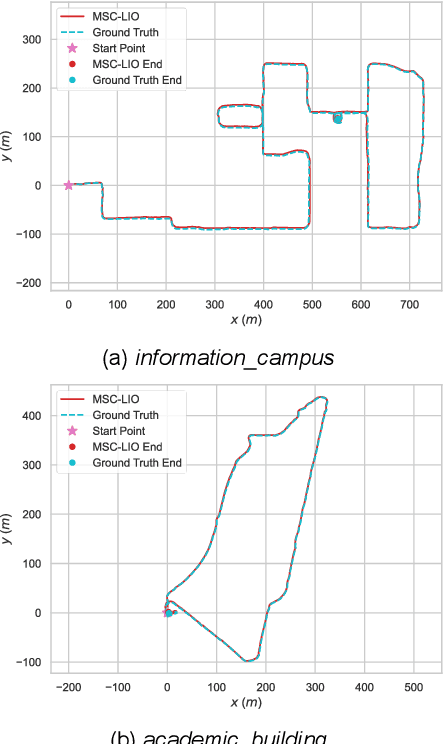
The multi-state constraint Kalman filter (MSCKF) has been proven to be more efficient than graph optimization for visual-based odometry while with similar accuracy. However, it has not yet been properly considered and studied for LiDAR-based odometry. In this paper, we propose a novel tightly coupled LiDAR-inertial odometry based on the MSCKF framework, named MSC-LIO. An efficient LiDAR same-plane-point (LSPP) tracking method, without explicit feature extraction, is present for frame-to-frame data associations. The tracked LSPPs are employed to build an LSPP measurement model, which constructs a multi-state constraint. Besides, we propose an effective point-velocity-based LiDAR-IMU time-delay (LITD) estimation method, which is derived from the proposed LSPP tracking method. Extensive experiments were conducted on both public and private datasets. The results demonstrate that the proposed MSC-LIO yields higher accuracy and efficiency than the state-of-the-art methods. The ablation experiment results indicate that the data-association efficiency is improved by nearly 3 times using the LSPP tracking method. Besides, the proposed LITD estimation method can effectively and accurately estimate the LITD.
SE-LIO: Semantics-enhanced Solid-State-LiDAR-Inertial Odometry for Tree-rich Environments
Dec 04, 2023



In this letter, we propose a semantics-enhanced solid-state-LiDAR-inertial odometry (SE-LIO) in tree-rich environments. Multiple LiDAR frames are first merged and compensated with the inertial navigation system (INS) to increase the point-cloud coverage, thus improving the accuracy of semantic segmentation. The unstructured point clouds, such as tree leaves and dynamic objects, are then removed with the semantic information. Furthermore, the pole-like point clouds, primarily tree trunks, are modeled as cylinders to improve positioning accuracy. An adaptive piecewise cylinder-fitting method is proposed to accommodate environments with a high prevalence of curved tree trunks. Finally, the iterated error-state Kalman filter (IESKF) is employed for state estimation. Point-to-cylinder and point-to-plane constraints are tightly coupled with the prior constraints provided by the INS to obtain the maximum a posteriori estimation. Targeted experiments are conducted in complex campus and park environments to evaluate the performance of SE-LIO. The proposed methods, including removing the unstructured point clouds and the adaptive cylinder fitting, yield improved accuracy. Specifically, the positioning accuracy of the proposed SE-LIO is improved by 43.1% compared to the plane-based LIO.
FF-LINS: A Consistent Frame-to-Frame Solid-State-LiDAR-Inertial State Estimator
Jul 13, 2023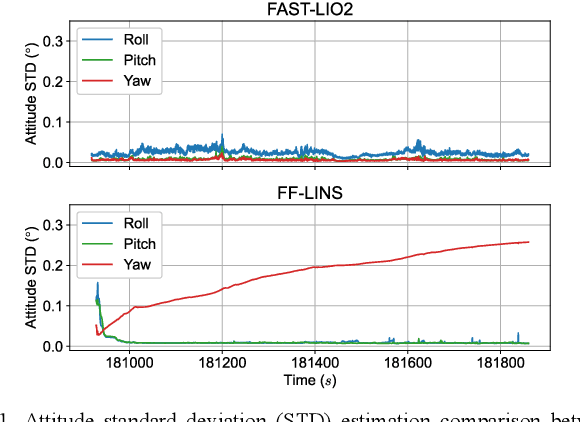
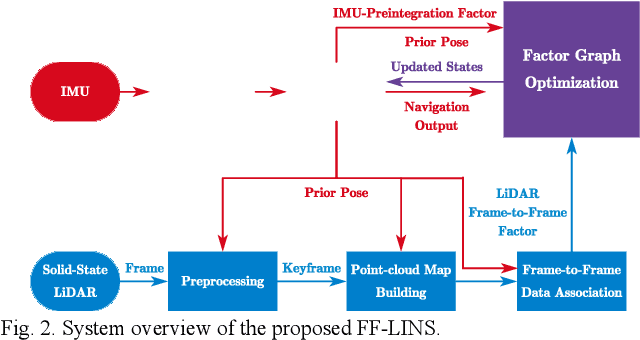
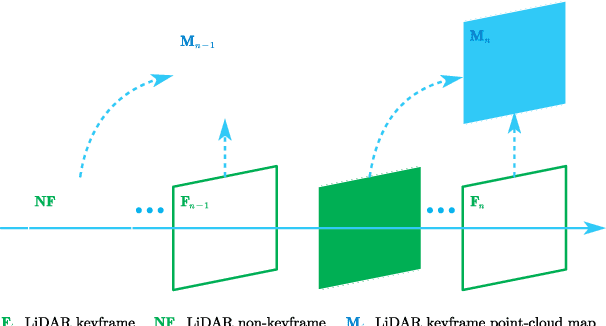
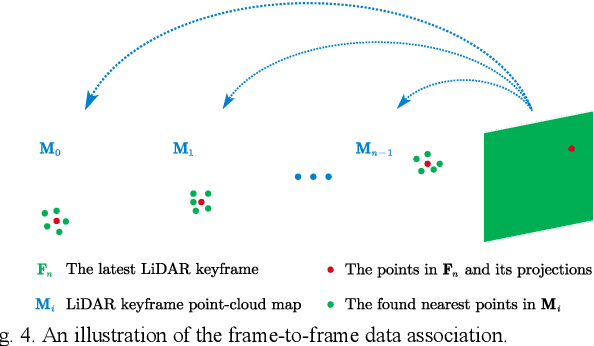
Most of the existing LiDAR-inertial navigation systems are based on frame-to-map registrations, leading to inconsistency in state estimation. The newest solid-state LiDAR with a non-repetitive scanning pattern makes it possible to achieve a consistent LiDAR-inertial estimator by employing a frame-to-frame data association. In this letter, we propose a robust and consistent frame-to-frame LiDAR-inertial navigation system (FF-LINS) for solid-state LiDARs. With the INS-centric LiDAR frame processing, the keyframe point-cloud map is built using the accumulated point clouds to construct the frame-to-frame data association. The LiDAR frame-to-frame and the inertial measurement unit (IMU) preintegration measurements are tightly integrated using the factor graph optimization, with online calibration of the LiDAR-IMU extrinsic and time-delay parameters. The experiments on the public and private datasets demonstrate that the proposed FF-LINS achieves superior accuracy and robustness than the state-of-the-art systems. Besides, the LiDAR-IMU extrinsic and time-delay parameters are estimated effectively, and the online calibration notably improves the pose accuracy. The proposed FF-LINS and the employed datasets are open-sourced on GitHub (https://github.com/i2Nav-WHU/FF-LINS).