 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMSC-LIO: An MSCKF-Based LiDAR-Inertial Odometry with Same-Plane-Point Tracking
Paper and Code
Jul 10, 2024
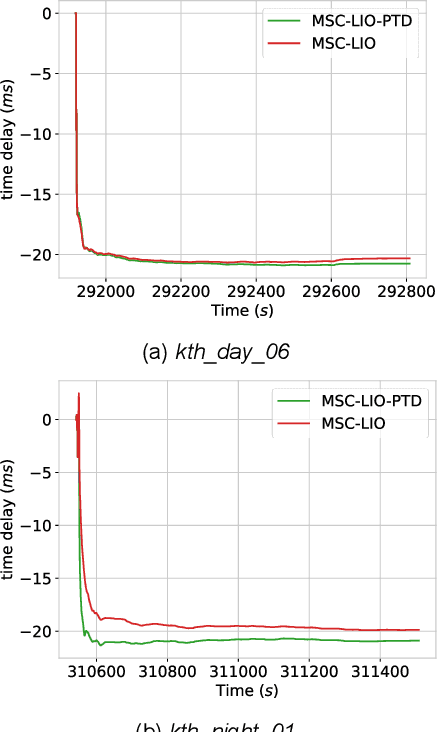

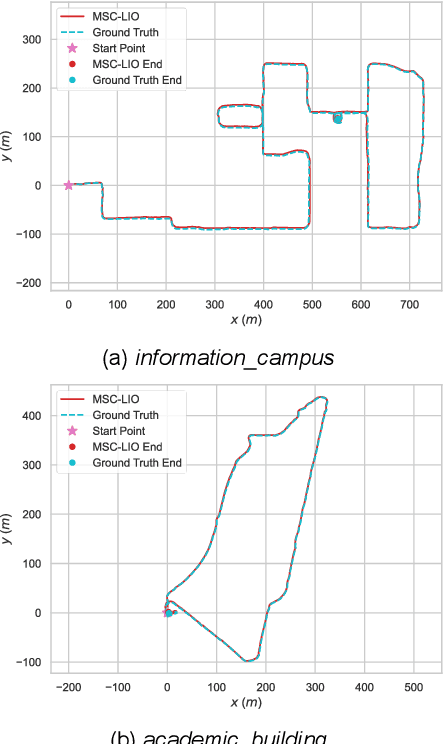
The multi-state constraint Kalman filter (MSCKF) has been proven to be more efficient than graph optimization for visual-based odometry while with similar accuracy. However, it has not yet been properly considered and studied for LiDAR-based odometry. In this paper, we propose a novel tightly coupled LiDAR-inertial odometry based on the MSCKF framework, named MSC-LIO. An efficient LiDAR same-plane-point (LSPP) tracking method, without explicit feature extraction, is present for frame-to-frame data associations. The tracked LSPPs are employed to build an LSPP measurement model, which constructs a multi-state constraint. Besides, we propose an effective point-velocity-based LiDAR-IMU time-delay (LITD) estimation method, which is derived from the proposed LSPP tracking method. Extensive experiments were conducted on both public and private datasets. The results demonstrate that the proposed MSC-LIO yields higher accuracy and efficiency than the state-of-the-art methods. The ablation experiment results indicate that the data-association efficiency is improved by nearly 3 times using the LSPP tracking method. Besides, the proposed LITD estimation method can effectively and accurately estimate the LITD.