 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Contextual Bandit Approach for Learning to Plan in Environments with Probabilistic Goal Configurations
Nov 29, 2022



Object-goal navigation (Object-nav) entails searching, recognizing and navigating to a target object. Object-nav has been extensively studied by the Embodied-AI community, but most solutions are often restricted to considering static objects (e.g., television, fridge, etc.). We propose a modular framework for object-nav that is able to efficiently search indoor environments for not just static objects but also movable objects (e.g. fruits, glasses, phones, etc.) that frequently change their positions due to human intervention. Our contextual-bandit agent efficiently explores the environment by showing optimism in the face of uncertainty and learns a model of the likelihood of spotting different objects from each navigable location. The likelihoods are used as rewards in a weighted minimum latency solver to deduce a trajectory for the robot. We evaluate our algorithms in two simulated environments and a real-world setting, to demonstrate high sample efficiency and reliability.
Compact-Table: Efficiently Filtering Table Constraints with Reversible Sparse Bit-Sets
Apr 22, 2016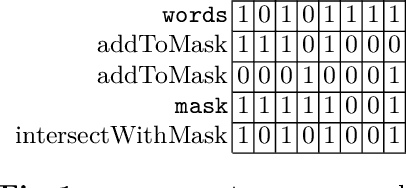


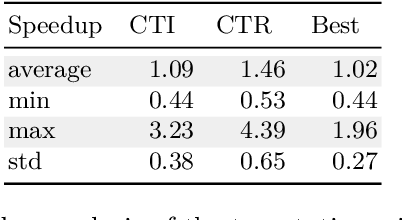
In this paper, we describe Compact-Table (CT), a bitwise algorithm to enforce Generalized Arc Consistency (GAC) on table con- straints. Although this algorithm is the default propagator for table constraints in or-tools and OscaR, two publicly available CP solvers, it has never been described so far. Importantly, CT has been recently improved further with the introduction of residues, resetting operations and a data-structure called reversible sparse bit-set, used to maintain tables of supports (following the idea of tabular reduction): tuples are invalidated incrementally on value removals by means of bit-set operations. The experimentation that we have conducted with OscaR shows that CT outperforms state-of-the-art algorithms STR2, STR3, GAC4R, MDD4R and AC5-TC on standard benchmarks.