 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeForecasting the Success of Television Series using Machine Learning
Oct 18, 2019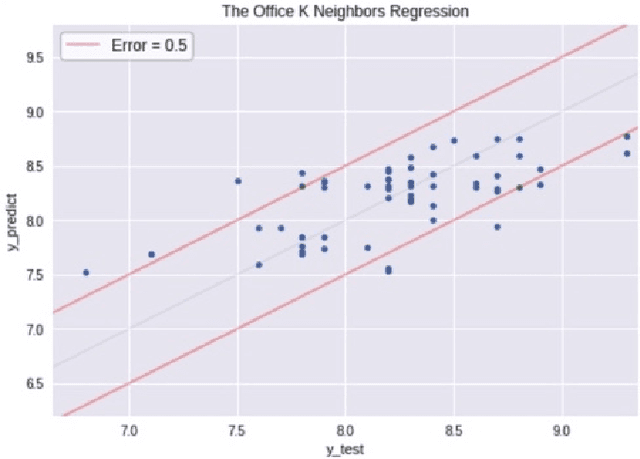
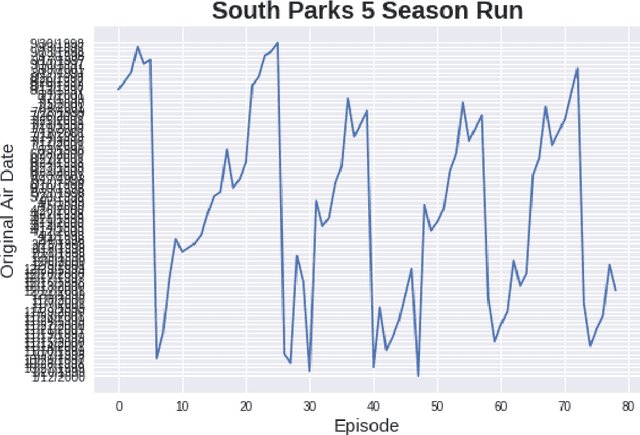
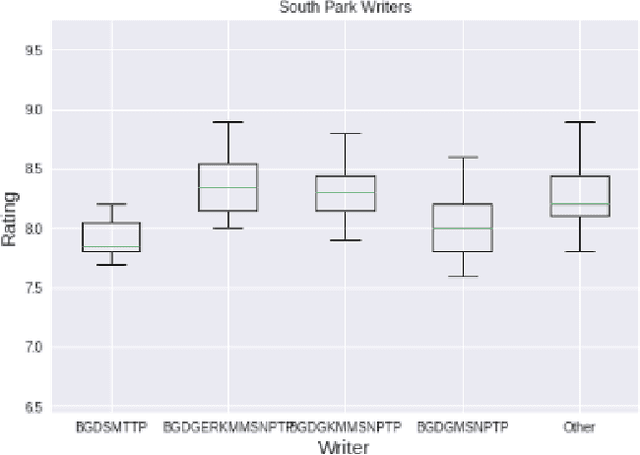
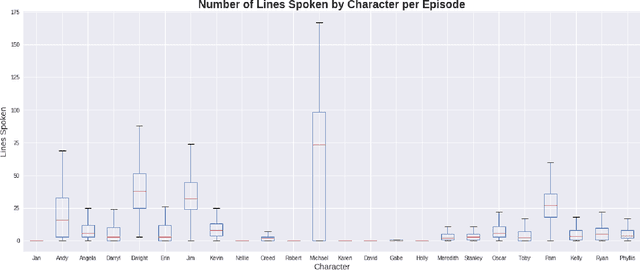
Television is an ever-evolving multi billion dollar industry. The success of a television show in an increasingly technological society is a vast multi-variable formula. The art of success is not just something that happens, but is studied, replicated, and applied. Hollywood can be unpredictable regarding success, as many movies and sitcoms that are hyped up and promise to be a hit end up being box office failures and complete disappointments. In current studies, linguistic exploration is being performed on the relationship between Television series and target community of viewers. Having a decision support system that can display sound and predictable results would be needed to build confidence in the investment of a new TV series. The models presented in this study use data to study and determine what makes a sitcom successful. In this paper, we use descriptive and predictive modeling techniques to assess the continuing success of television comedies: The Office, Big Bang Theory, Arrested Development, Scrubs, and South Park. The factors that are tested for statistical significance on episode ratings are character presence, director, and writer. These statistics show that while characters are indeed crucial to the shows themselves, the creation and direction of the shows pose implication upon the ratings and therefore the success of the shows. We use machine learning based forecasting models to accurately predict the success of shows. The models represent a baseline to understanding the success of a television show and how producers can increase the success of current television shows or utilize this data in the creation of future shows. Due to the many factors that go into a series, the empirical analysis in this work shows that there is no one-fits-all model to forecast the rating or success of a television show.
Kick control: using the attracting states arising within the sensorimotor loop of self-organized robots as motor primitives
Jun 25, 2018


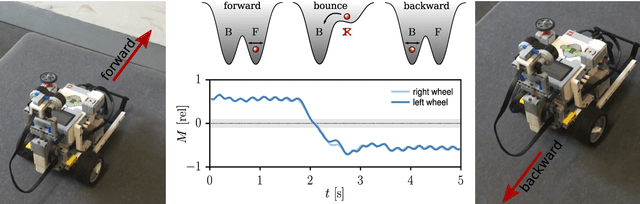
Self-organized robots may develop attracting states within the sensorimotor loop, that is within the phase space of neural activity, body, and environmental variables. Fixpoints, limit cycles, and chaotic attractors correspond in this setting to a non-moving robot, to directed, and to irregular locomotion respectively. Short higher-order control commands may hence be used to kick the system from one self-organized attractor robustly into the basin of attraction of a different attractor, a concept termed here as kick control. The individual sensorimotor states serve in this context as highly compliant motor primitives. We study different implementations of kick control for the case of simulated and real-world wheeled robots, for which the dynamics of the distinct wheels is generated independently by local feedback loops. The feedback loops are mediated by rate-encoding neurons disposing exclusively of propriosensoric inputs in terms of projections of the actual rotational angle of the wheel. The changes of the neural activity are then transmitted into a rotational motion by a simulated transmission rod akin to the transmission rods used for steam locomotives. We find that the self-organized attractor landscape may be morphed both by higher-level control signals, in the spirit of kick control, and by interacting with the environment. Bumping against a wall destroys the limit cycle corresponding to forward motion, with the consequence that the dynamical variables are then attracted in phase space by the limit cycle corresponding to backward moving. The robot, which does not dispose of any distance or contact sensors, hence reverses direction autonomously.
* 17 pages, 9 figures
Closed-loop robots driven by short-term synaptic plasticity: Emergent explorative vs. limit-cycle locomotion
Mar 14, 2018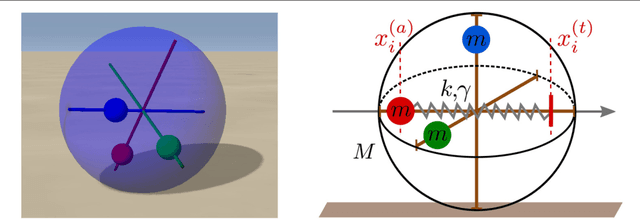
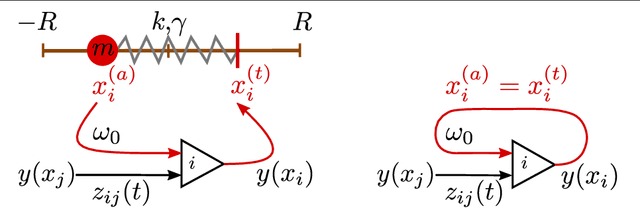

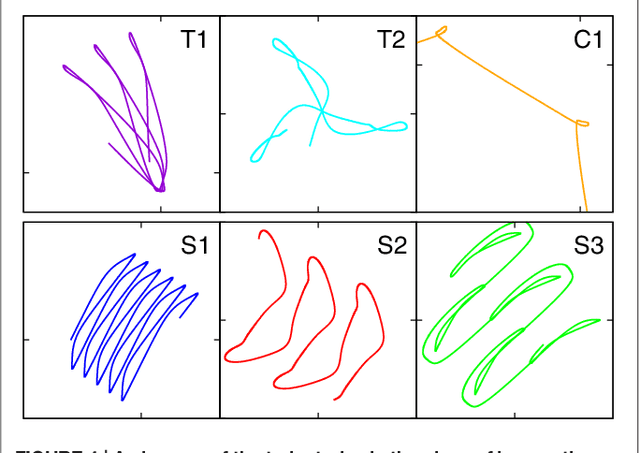
We examine the hypothesis, that short-term synaptic plasticity (STSP) may generate self-organized motor patterns. We simulated sphere-shaped autonomous robots, within the LPZRobots simulation package, containing three weights moving along orthogonal internal rods. The position of a weight is controlled by a single neuron receiving excitatory input from the sensor, measuring its actual position, and inhibitory inputs from the other two neurons. The inhibitory connections are transiently plastic, following physiologically inspired STSP-rules. We find that a wide palette of motion patterns are generated through the interaction of STSP, robot, and environment (closed-loop configuration), including various forward meandering and circular motions, together with chaotic trajectories. The observed locomotion is robust with respect to additional interactions with obstacles. In the chaotic phase the robot is seemingly engaged in actively exploring its environment. We believe that our results constitute a concept of proof that transient synaptic plasticity, as described by STSP, may potentially be important for the generation of motor commands and for the emergence of complex locomotion patterns, adapting seamlessly also to unexpected environmental feedback. We observe spontaneous and collision induced mode switchings, finding in addition, that locomotion may follow transiently limit cycles which are otherwise unstable. Regular locomotion corresponds to stable limit cycles in the sensorimotor loop, which may be characterized in turn by arbitrary angles of propagation. This degeneracy is, in our analysis, one of the drivings for the chaotic wandering observed for selected parameter settings, which is induced by the smooth diffusion of the angle of propagation.
* 15 pages, 12 figures
The sensorimotor loop as a dynamical system: How regular motion primitives may emerge from self-organized limit cycles
Mar 14, 2018

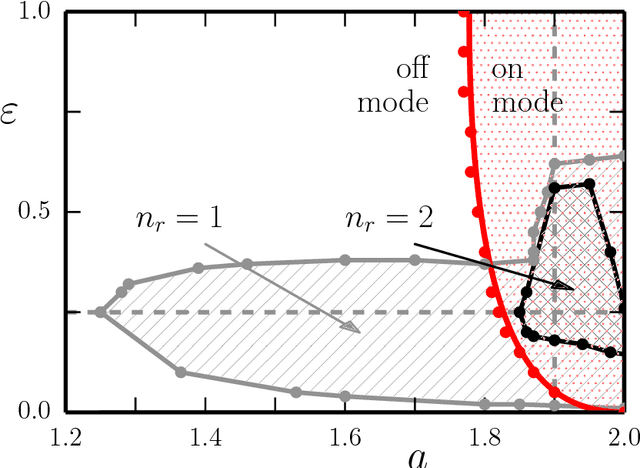

We investigate the sensorimotor loop of simple robots simulated within the LPZRobots environment from the point of view of dynamical systems theory. For a robot with a cylindrical shaped body and an actuator controlled by a single proprioceptual neuron we find various types of periodic motions in terms of stable limit cycles. These are self-organized in the sense, that the dynamics of the actuator kicks in only, for a certain range of parameters, when the barrel is already rolling, stopping otherwise. The stability of the resulting rolling motions terminates generally, as a function of the control parameters, at points where fold bifurcations of limit cycles occur. We find that several branches of motion types exist for the same parameters, in terms of the relative frequencies of the barrel and of the actuator, having each their respective basins of attractions in terms of initial conditions. For low drivings stable limit cycles describing periodic and drifting back-and-forth motions are found additionally. These modes allow to generate symmetry breaking explorative behavior purely by the timing of an otherwise neutral signal with respect to the cyclic back-and-forth motion of the robot.
Case Adaptation with Qualitative Algebras
Oct 10, 2013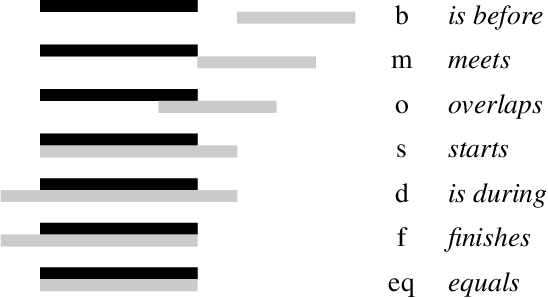
This paper proposes an approach for the adaptation of spatial or temporal cases in a case-based reasoning system. Qualitative algebras are used as spatial and temporal knowledge representation languages. The intuition behind this adaptation approach is to apply a substitution and then repair potential inconsistencies, thanks to belief revision on qualitative algebras. A temporal example from the cooking domain is given. (The paper on which this extended abstract is based was the recipient of the best paper award of the 2012 International Conference on Case-Based Reasoning.)